 Федорченко Владислав
Федорченко Владислав

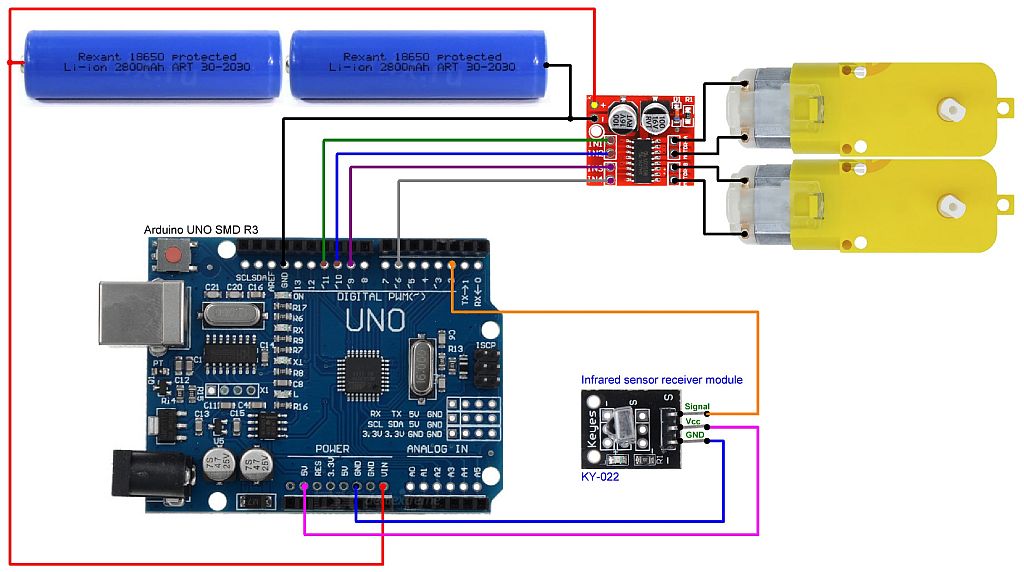
Робот выполнен на платформе КРАБ-2
Его можно сделать из простого робота,
двигающегося по заданному алгоритму, достаточно добавить ИК-приемник типа
KY-022 и загрузить в него новую
программу.
Принципиальная схема робота:
Монтажная схема робота:
Программа
/* Робот IR */
#define IR_up 0x2
#define IR_right 0x60
#define IR_left 0xE0
#define IR_down 0x82
#include <NecDecoder.h>
NecDecoder ir;
void setup() {
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(9, OUTPUT);
pinMode(6, OUTPUT);
Serial.begin(9600);
attachInterrupt(0, irIsr, FALLING);
boolean VL;
}
void irIsr() {
ir.tick();
}
void loop() {
if (ir.available()) {
switch (ir.readCommand()) {
case IR_up: digitalWrite(11, HIGH); digitalWrite(10, LOW); digitalWrite(9, HIGH); digitalWrite(6, LOW); delay(250); digitalWrite(11, 0); digitalWrite(10, LOW); digitalWrite(9, 0); digitalWrite(6, LOW); break;
case IR_down: digitalWrite(11, LOW); digitalWrite(10, HIGH); digitalWrite(9, LOW); digitalWrite(6, HIGH); delay(25ssa0); digitalWrite(11, 0); digitalWrite(10, LOW); digitalWrite(9, 0); digitalWrite(6, LOW); break;
case IR_left: digitalWrite(11, HIGH); digitalWrite(10, LOW); delay(250); digitalWrite(11, 0); digitalWrite(10, LOW); digitalWrite(9, 0); digitalWrite(6, LOW); break;
case IR_right: digitalWrite(9, HIGH); digitalWrite(6, LOW); delay(250); digitalWrite(11, 0); digitalWrite(10, LOW); digitalWrite(9, 0); digitalWrite(6, LOW); break;
}
}
}
А вот видео как это работает:
Copyright © R9AL 2024 Все права защищены