
Этот робот не имеет внешних датчиков, но его можно запрограммировать на движение
по заданному алгоритму.
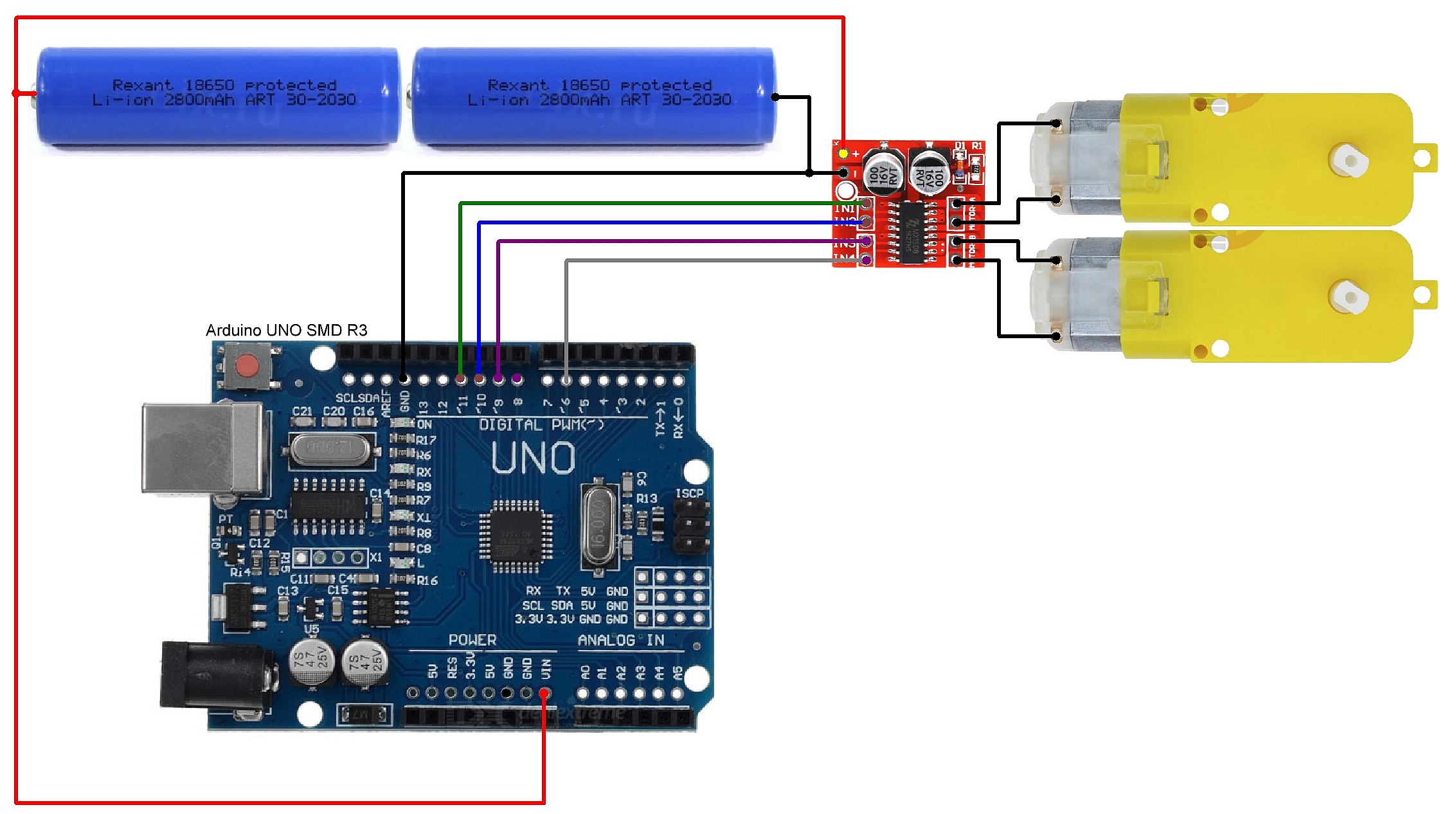
Принципиальная схема робота:

Монтажная схема робота:
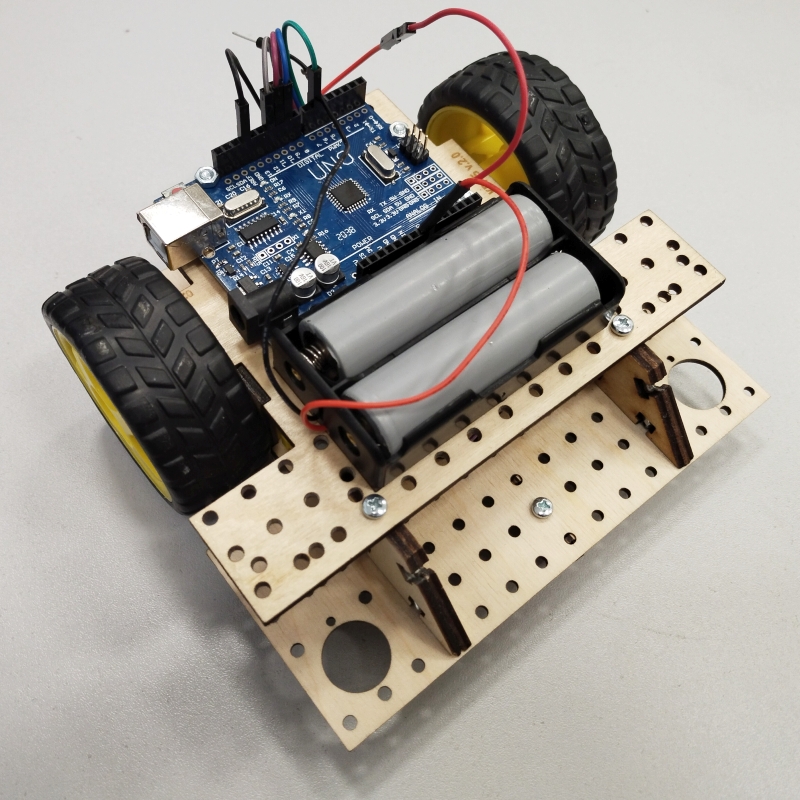
Сборка робота:
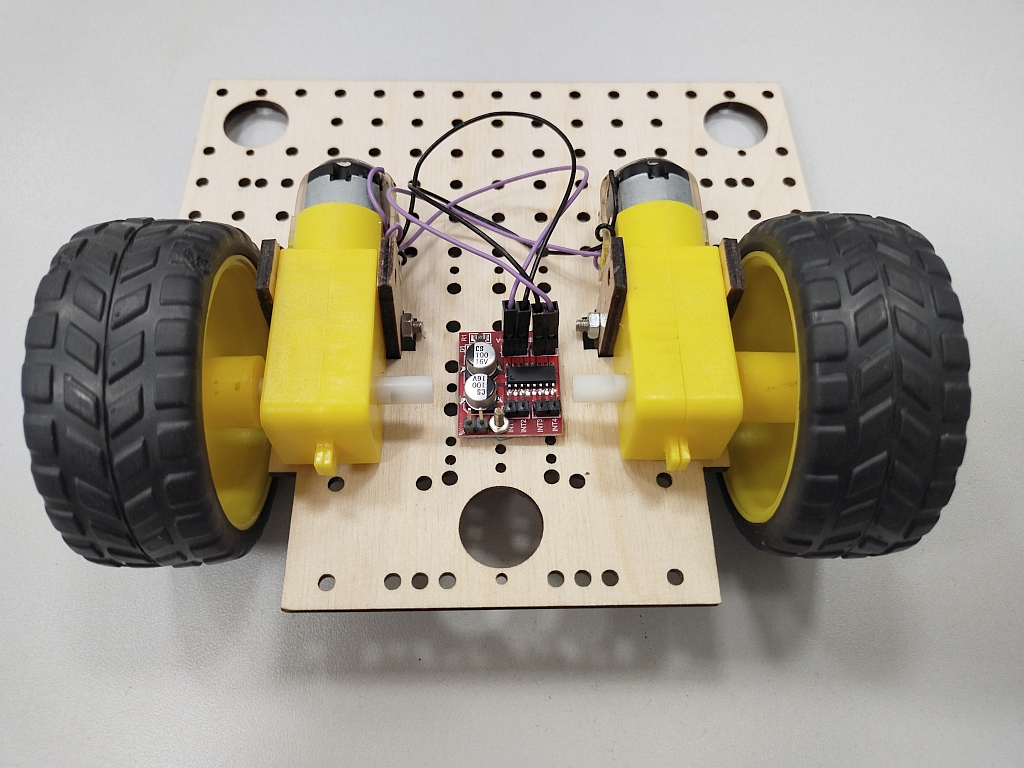
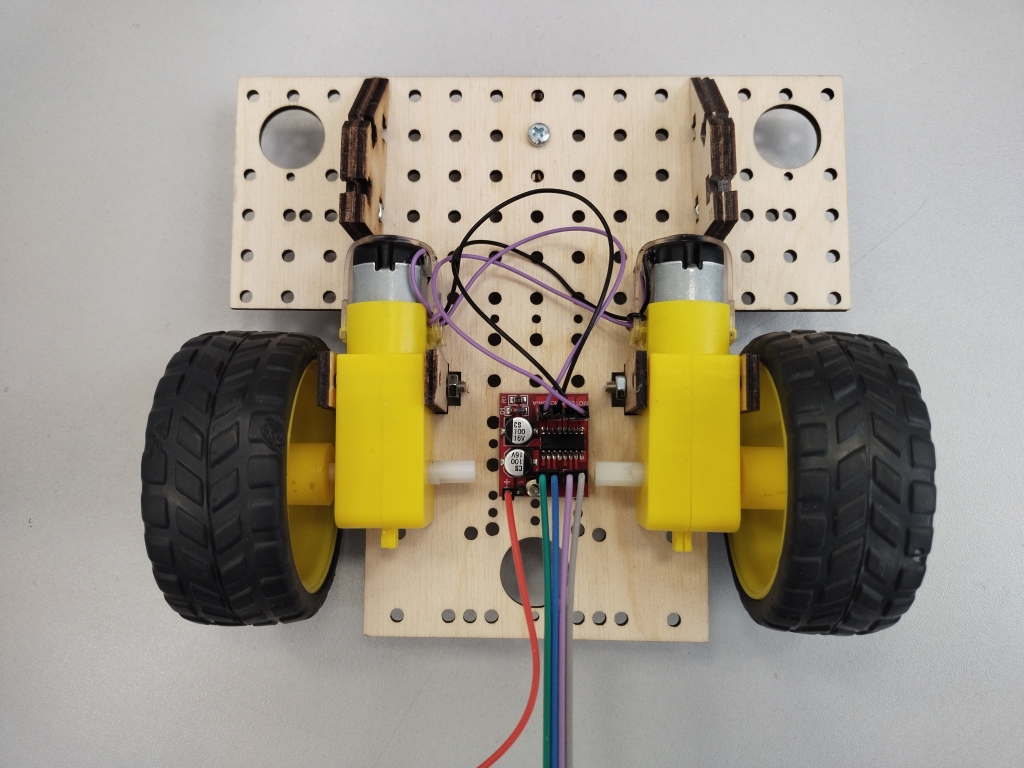
Робот состоит из двух частей. Первая часть - колесная платформа, собранная на основной плате (деталь 01). Сборка работа начинается со сборки двухколесной платформы на мотор-редукторах ТТ1:48.
После того, как платформа собрана - на нее нужно установить плату драйвера двигателей MX-1508
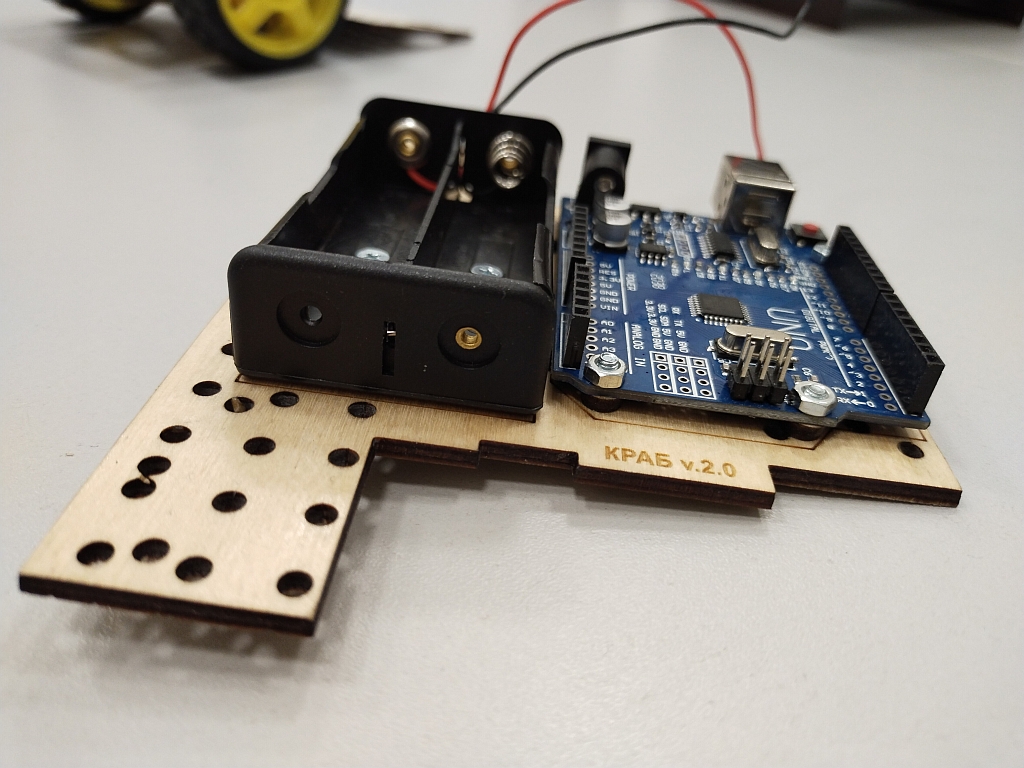
После сборки платформы, собираем вторую часть робота, на дополнительной плате (деталь 02), на которую нужно установить контроллер Arduino UNO и батарейный отсек для двух аккумуляторов 18650. Плата Arduino UNO крепится тремя винтами с потайными головками, поэтому необходимо произвести зенковку отверстий с обратной стороны платы 02. Зенковать отверстия необходимо с помощью специального сверла (или сверлом по металлу диаметром 8 мм.). Батарейный отсек также крепится винтами с потайными головками:
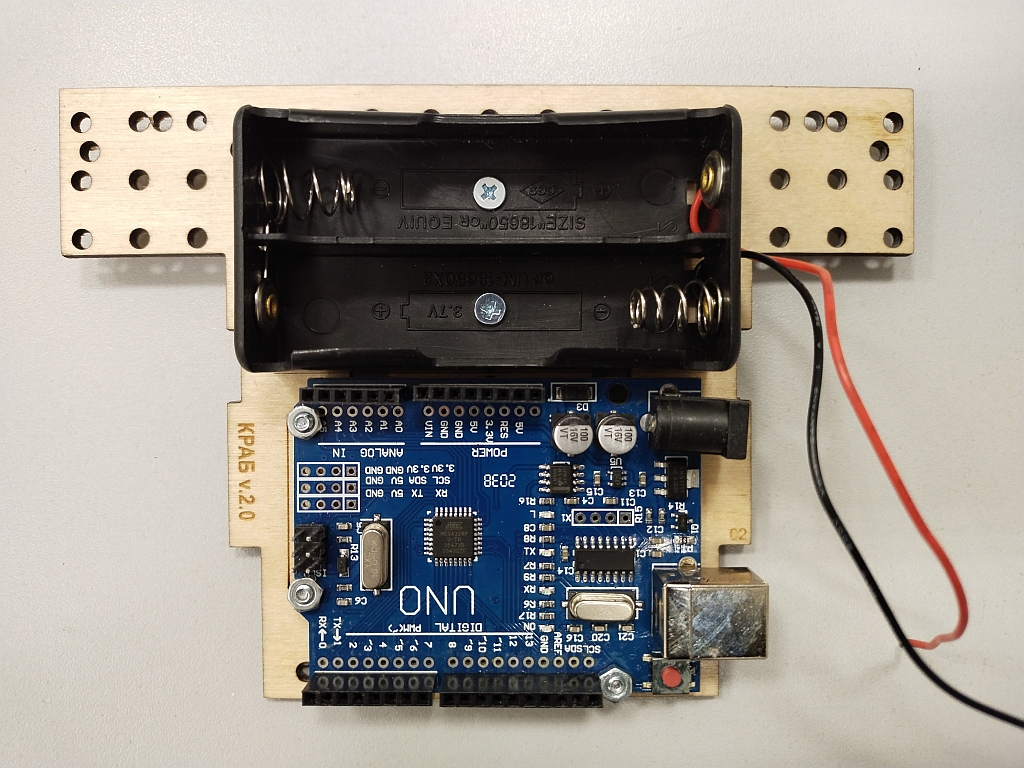
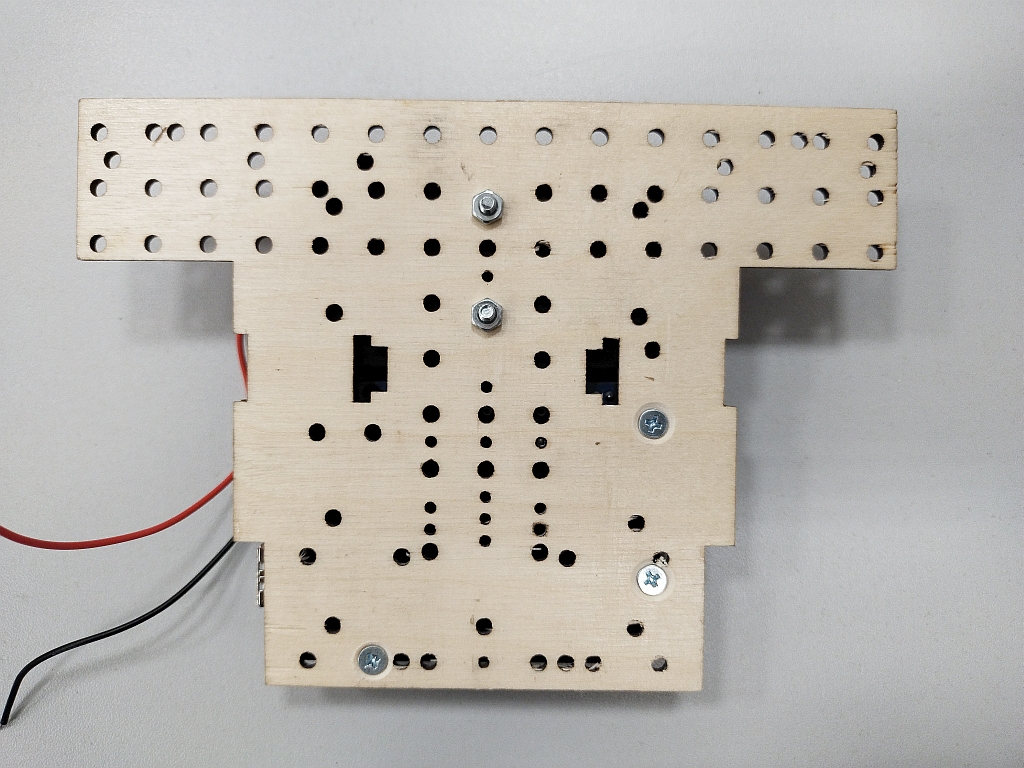
Для крепления контроллера Arduino UNO обязательно использовать шайбы, которые входят в Набор деталей для сборки мобильных роботов "КРАБ".
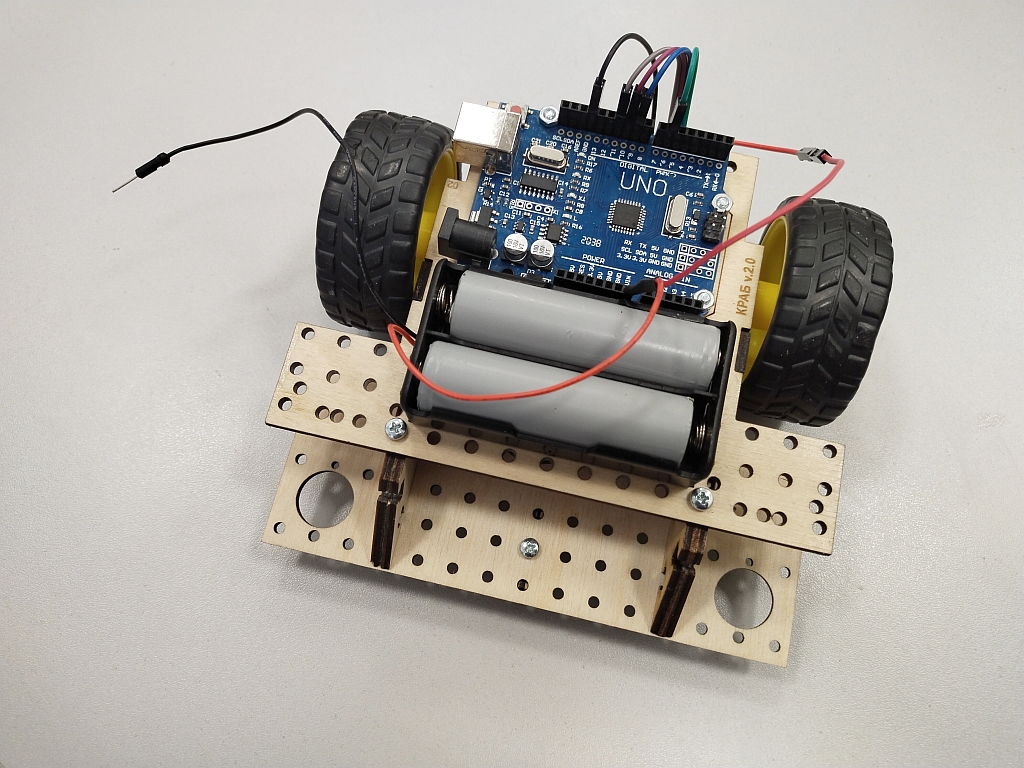
Далее производится окончательная сборка робота и соединение частей робота в соответствии с принципиальной схемой. Для соединения используются типовые гибкие соединительные перемычки длиной 10 см типа штекер-гнездо.
Программирование робота
Напишем простую программу, в соответствии с которой робот будет двигаться прямо в течении одной секунды, останавливаться на одну секунду, поворачивать направо в течении 0.7 секунды, опять останавливаться на секунду и далее процесс будет повторяться. Вот код:
/* Робот */
void setup() {
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(9, OUTPUT);
pinMode(6, OUTPUT);
}
void loop() {
digitalWrite(6, HIGH); digitalWrite(9, LOW); // Двигаться вперед
digitalWrite(10, HIGH); digitalWrite(11, LOW); //
delay(1000); // в течении одной секунды
digitalWrite(6, LOW); digitalWrite(9, LOW); // Остановиться
digitalWrite(10, LOW); digitalWrite(11, LOW); //
delay(1000); // на одну секунду
digitalWrite(6, HIGH); digitalWrite(9, LOW); // Повернуть на право
digitalWrite(10, LOW); digitalWrite(11, LOW); //
delay(700); // поворот в течении 0,7 секунд
digitalWrite(6, LOW); digitalWrite(9, LOW); // Остановиться
digitalWrite(10, LOW); digitalWrite(11, LOW); //
delay(1000); // на одну секунду
}
А вот видео как это работает:
Задание
Попробуйте запрограммировать робота на более сложные движения, включая,
например, движение задним ходом, разворот на месте, плавный поворот и т.п.
31.03.2022
Одно из выполненных заданий:
Обсуждение на форуме
Copyright © R9AL 2022 Все права защищены