
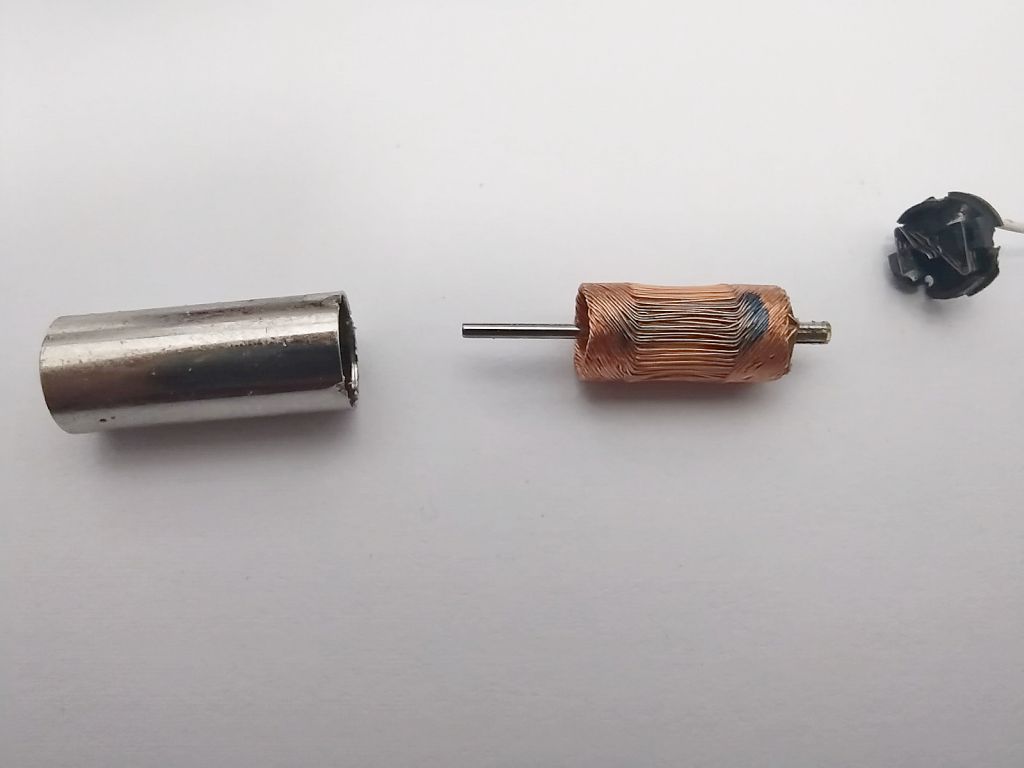
С квадрокоптером Syma X13 возникли проблемы, которые никак не получалось решить - после нескольких серьезных падений что-то видимо случилось с гироскопом, в общем модель стала зававливаться на один бок и никакими средствами не удалось это исправить. Кроме того, оказалось довольно проблематично найти для него аккумуляторы - пришлось "колхозить", крепить в крышке, которая закрывает аккумуляторный отсек аккумулятор большего размера (но примерно той же массы). И, наконец, после очередной "жесткой посадки" отломилась один пропеллер, не сломался, а именно отломился вместе с частью шестерни. Попытки как-то его приклеить особых результатов не дали, продлив жизнь квадрокоптера еще на пару полетов. В завершении всего, еще и сгорел один двигатель - возникли проблемы со щетками. Он конечно был отремонтирован, но проработал недолго, в итоге все-таки сгорела обмотка ротора.
В общем в результате остался коптер с тремя исправными моторами и практически рабочей
электроникой. Ремонтировать его не было никакого смысла, поэтому мы решили провести
небольшой эксперимент - собрать на основе этого "железа" двухмоторный планер.
Идея была в том, что пока моторы (на каждом крыле по одному мотору) не работают - планер планирует как планер, при включении моторов (стик "вверх" на пульте управления) планер набирает высоту. Стиком "вправо" - "влево" увеличиваем тягу соответствующего мотора, что позволит планеру поворачивать в нужную сторону. В целом, управление получается довольно простое. Вот что получилось:


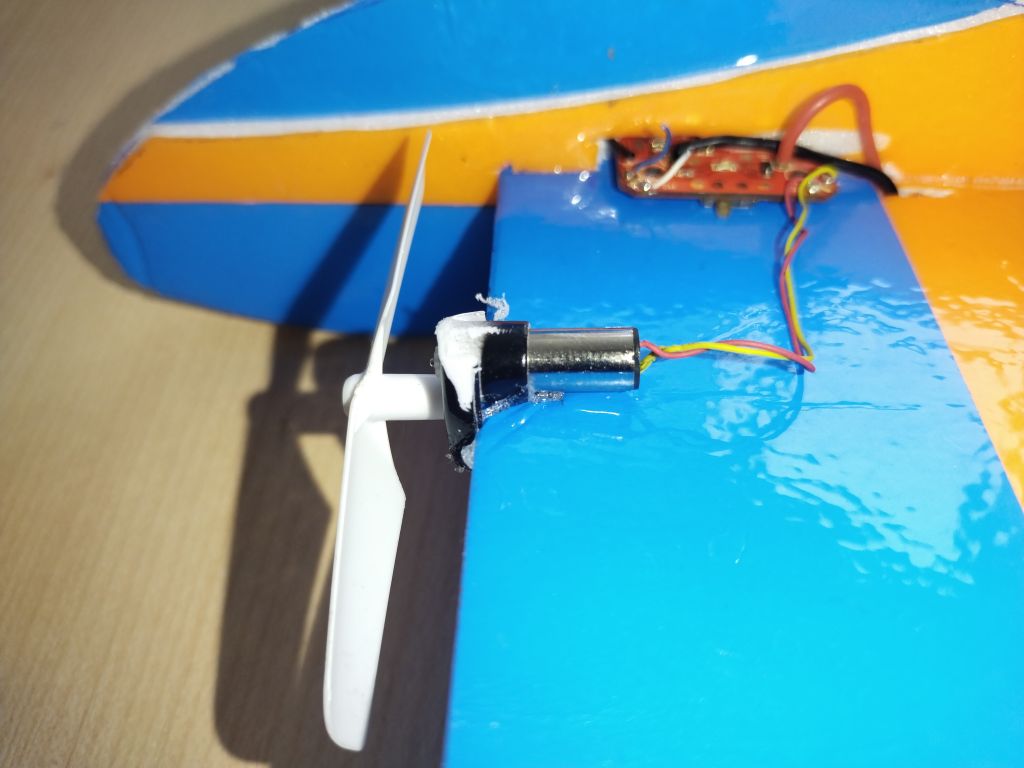
Двигатели были отпилены от рамы квадрокоптера вместе с частью рамы и редуктором, и приклеены к передней кромке крыла. Изначально моторы предполагалось установить дальше от фюзеляжа, но пока для экспериментов достаточно такого расположения. Возможно, в дальнейшем их все-таки отодвинем.



Первые летные испытания показали, что во-первых это летает, а во-вторых, обнаружился интересный эффект, о котором вначале даже как-то и не подумали): при прямолинейном полете, планер четко держит направление, если он пытается заваливаться влево, например за счет несовершенства конструкции или например из-за бокового ветра - гироскоп на это реагирует и распределяет тягу двигателей так, чтобы планер оставался на прямой. Т.е. если планер пытается повернуть влево - тяга левого двигателя увеличивается, а правого уменьшается и планер возвращается на прямолинейную траекторию.
Тема форума: https://forum.msevm.ru/index.php?topic=25
Файлы:
Copyright © R9AL 2023 Все права защищены