 Задиханов Радмир
Задиханов Радмир
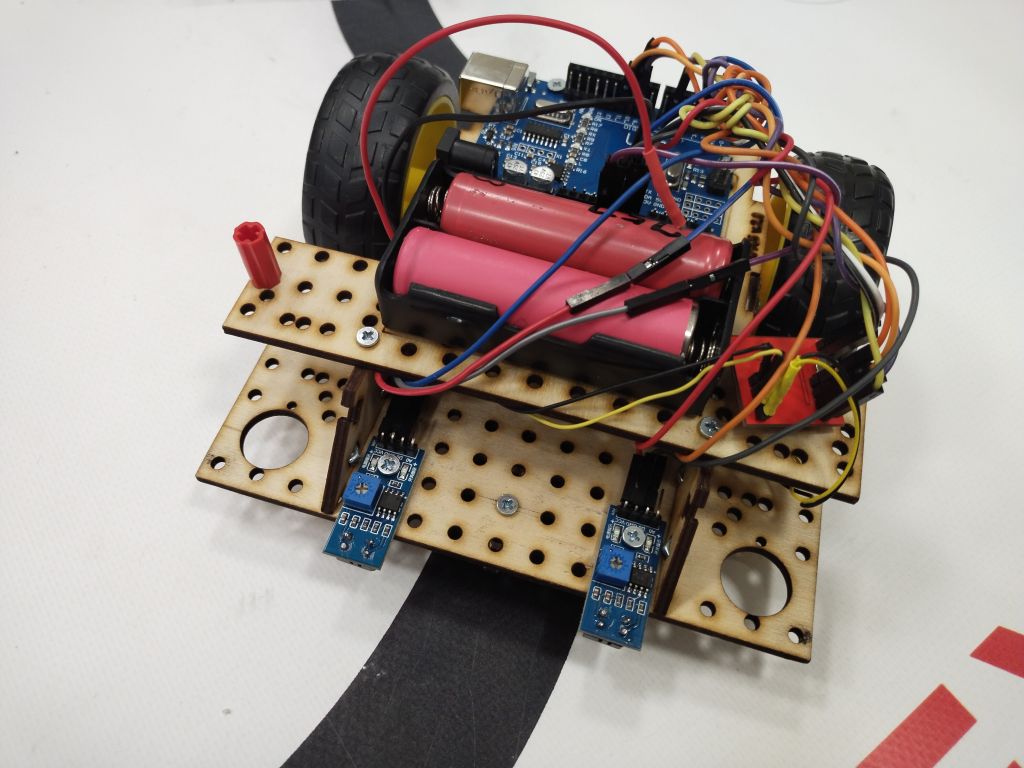
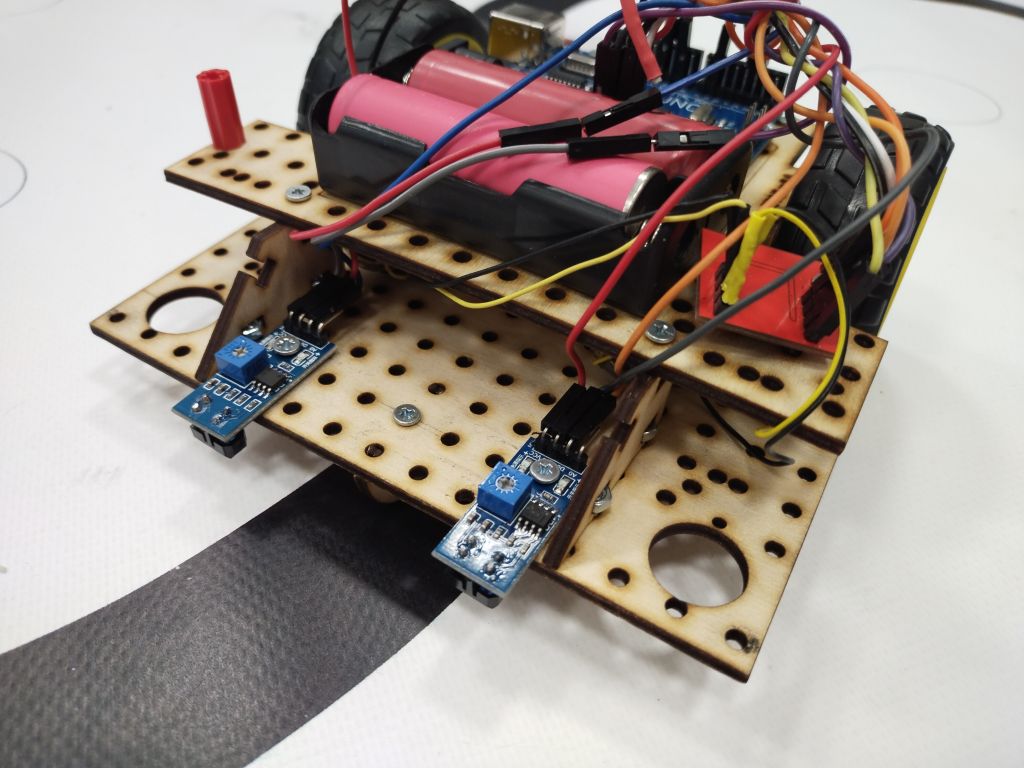
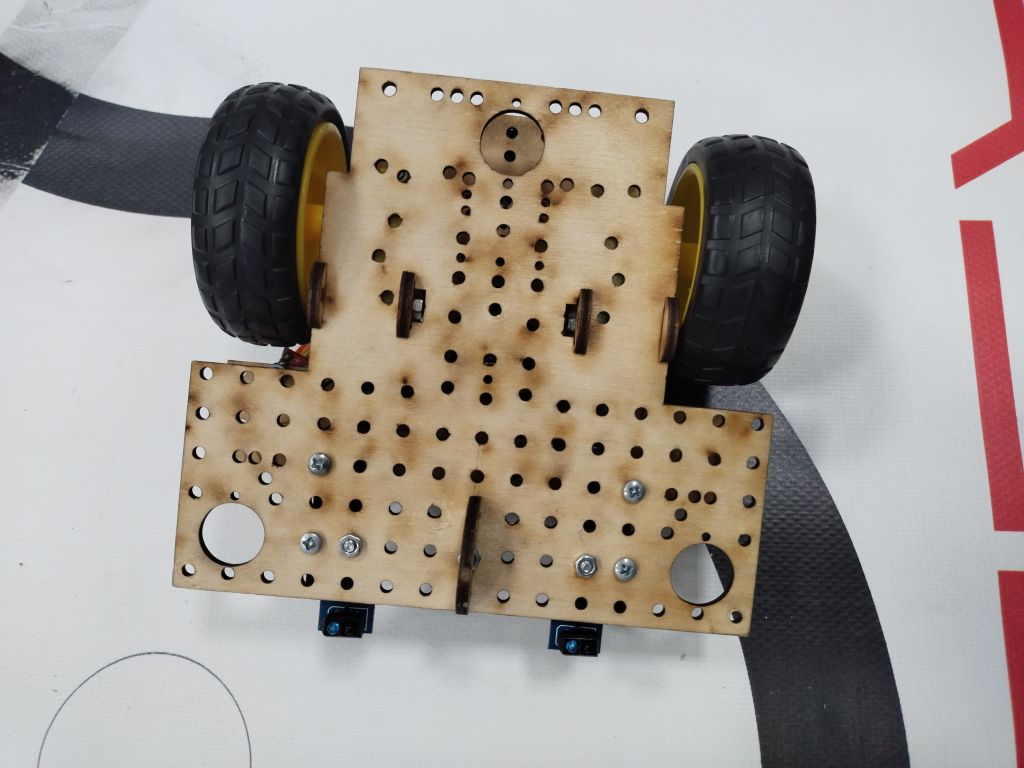
Робот изготовлен для соревнований "Траектория" (Движение вдоль черной линии) из
набора "КРАБ-2" с использованием
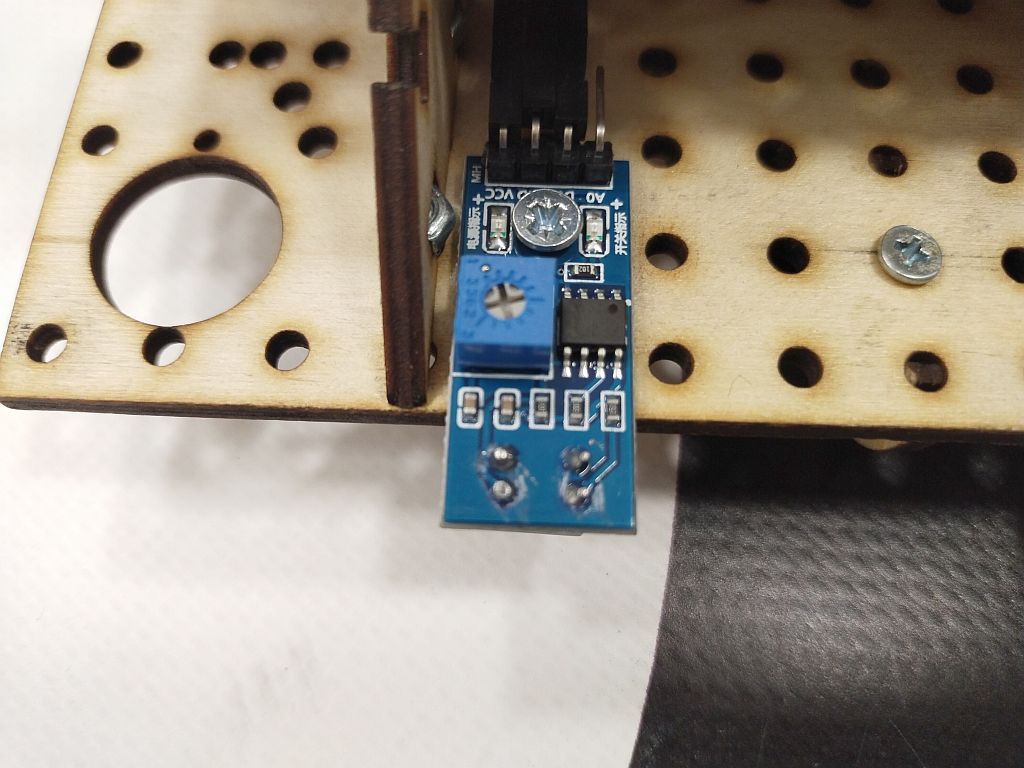
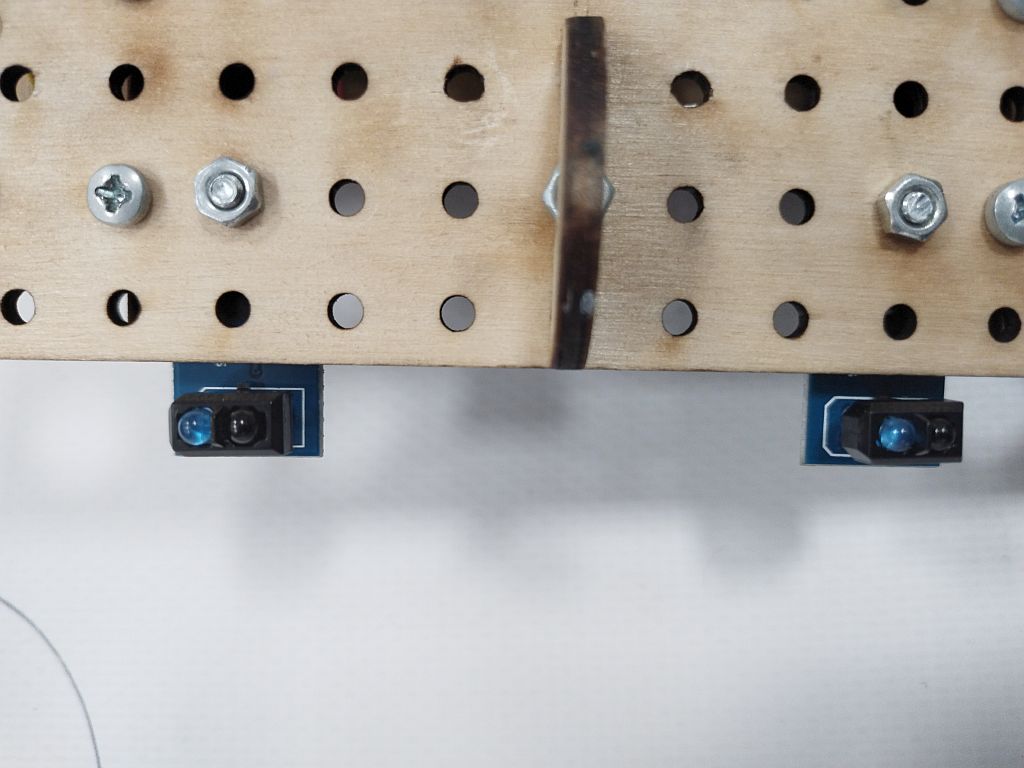
датчика линии TCRT5000 на LM393. В данной
конструкции используется цифровой выход датчика.
Робот изготовлен для соревнований, проводимых в рамках XV городского открытого Фестиваля технического творчества учащихся.
Скетч:
void setup() {
pinMode(2,INPUT); // левый датчик
pinMode(3,INPUT); // правый датчик
pinMode(6,OUTPUT); // управление мотором
pinMode(9,OUTPUT); // управление мотором
pinMode(10,OUTPUT); // управление мотором
pinMode(11,OUTPUT); // управление мотором
}
void loop() {
if(!digitalRead(2) == 1 && !digitalRead(3) == 0)
{ // если 1 датчик показывает черный, то крутим противоположное датчику колесо
analogWrite(6,68);
analogWrite(10,0);
}
if(!digitalRead(3) == 1 && !digitalRead(2) == 0)
{ // если 2 датчик показывает черный, то крутим противоположное датчику колесо
analogWrite(10,68);
analogWrite(6,0);
}
if(!digitalRead(3) == 1 && !digitalRead(2) == 1 )
{ // если оба датчика показывает белый, то крутим оба колеса
analogWrite(10,80);
analogWrite(6,80);
}
if(!digitalRead(3) == 0 && !digitalRead(2) == 0)
{ // если оба датчика показывает черныйZ, то крутим оба колеса
analogWrite(6,80);
analogWrite(10,80);
}
}
Обсудить на форуме
Copyright © R9AL 2023 Все права защищены