
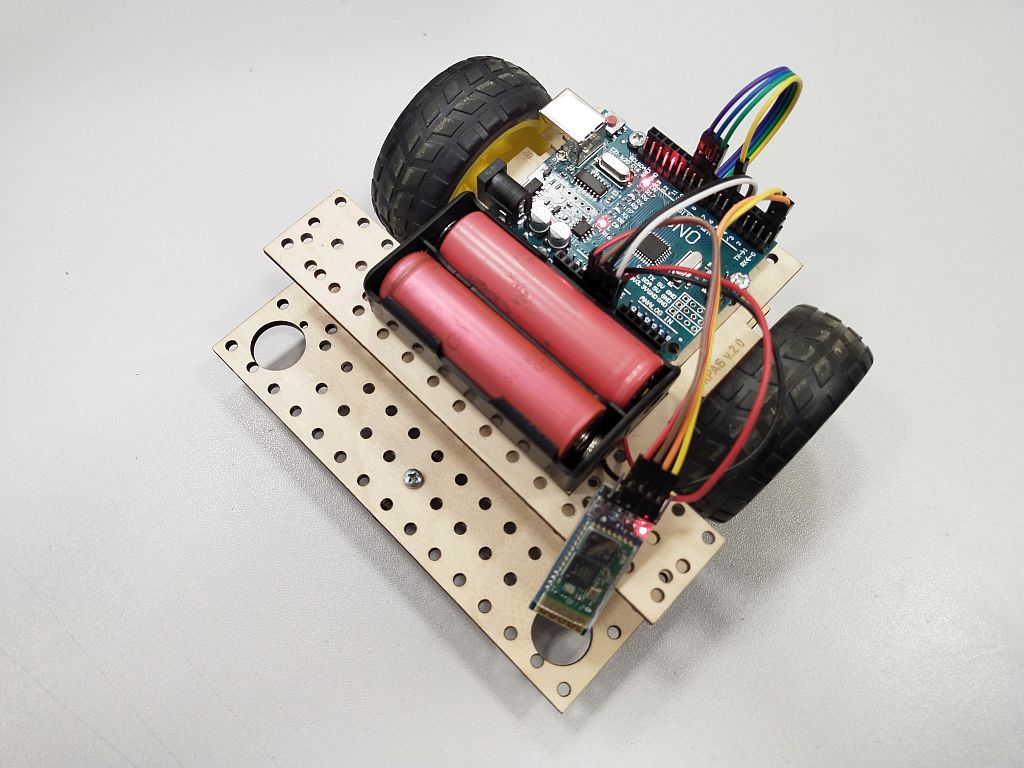
Инструкция по сборке робота, управляемого по Bluetooth из набора "КРАБ-2"
Робот состоит из двух частей: нижней части - колесной платформы, собранной на
основной плате 01, и верхней части, собранной на малой плате 02.
Сборка колесной платформы
Сборка робота начинается со сборки колесной платформы. Сначала необходимо
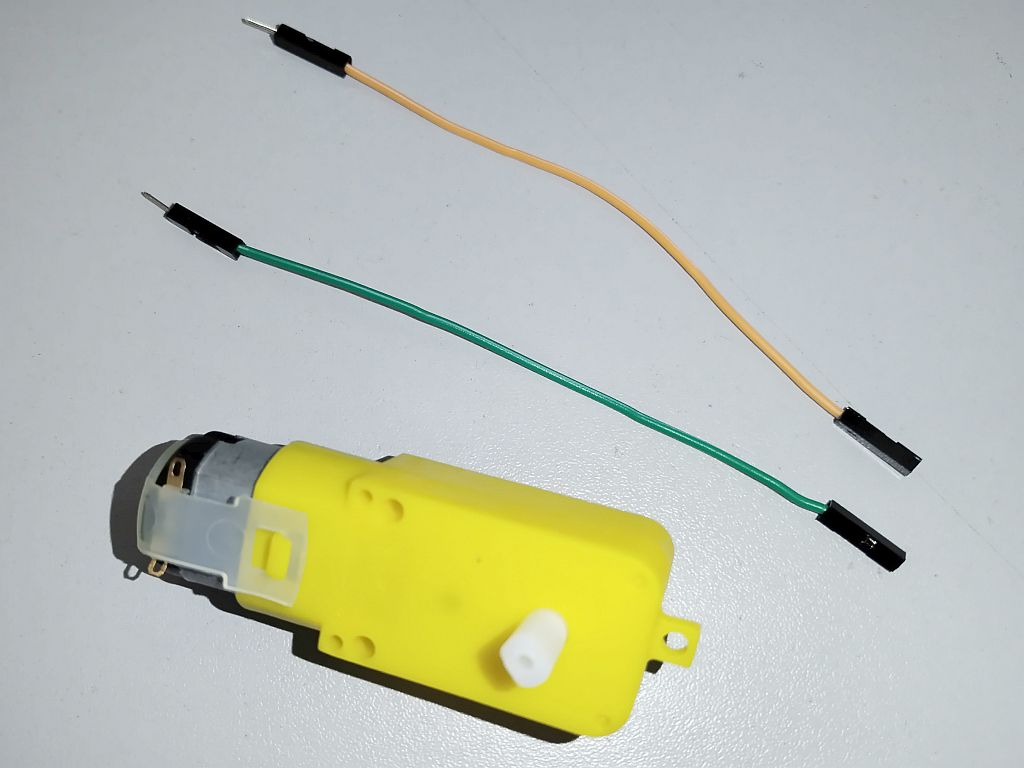
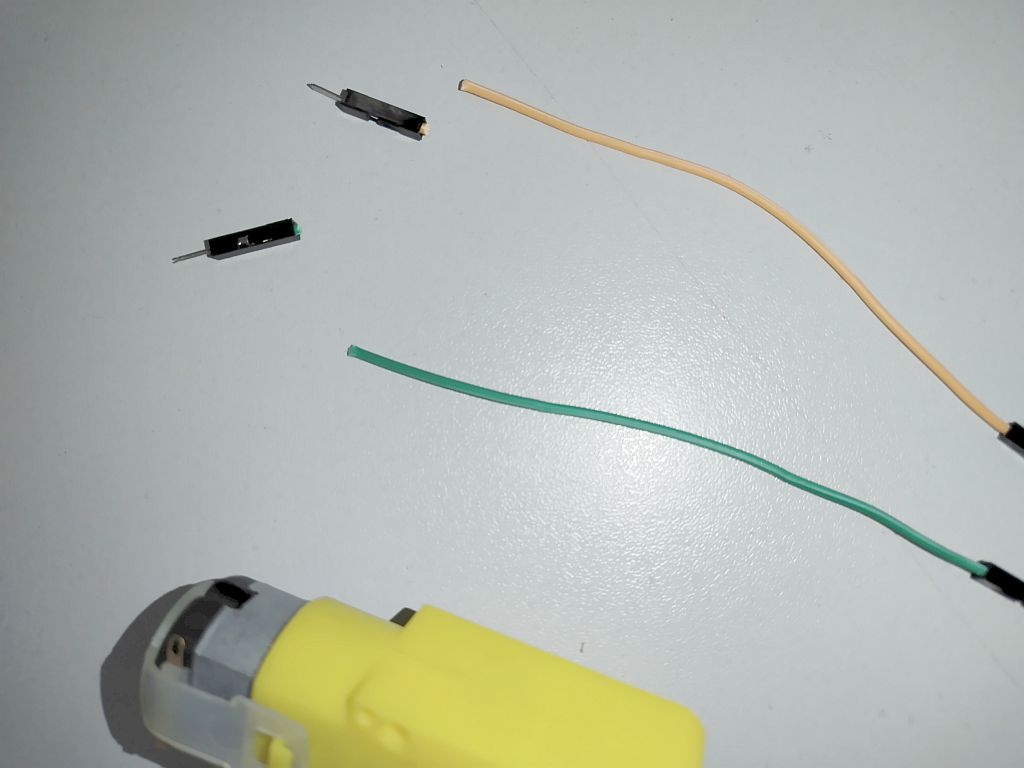
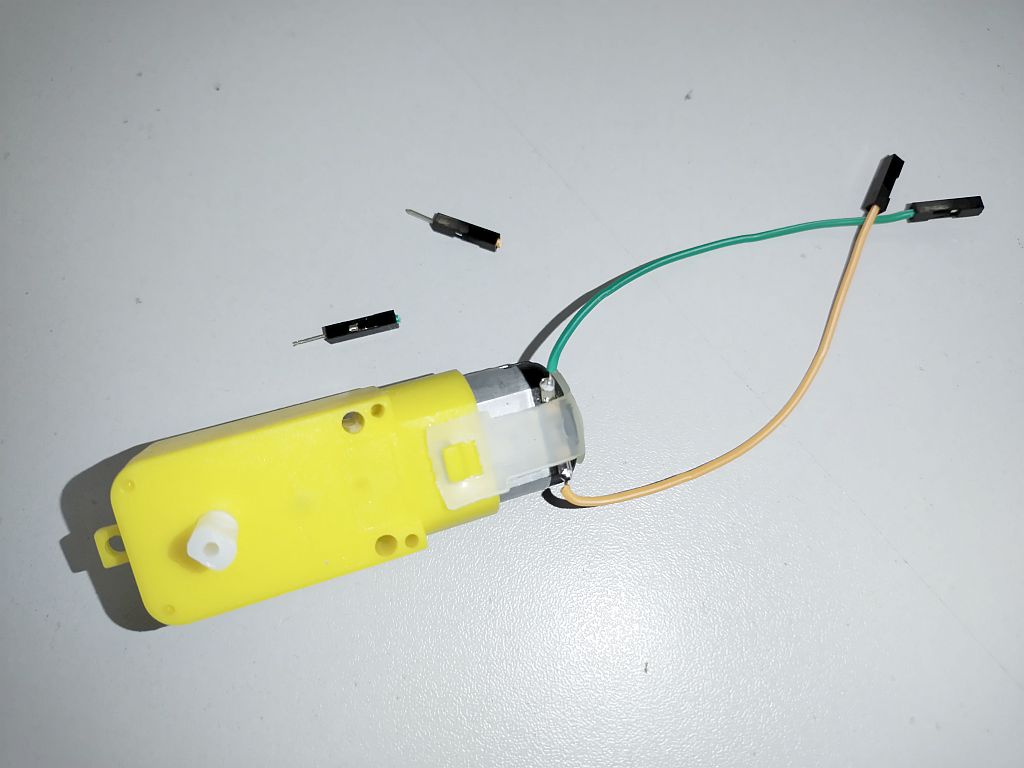
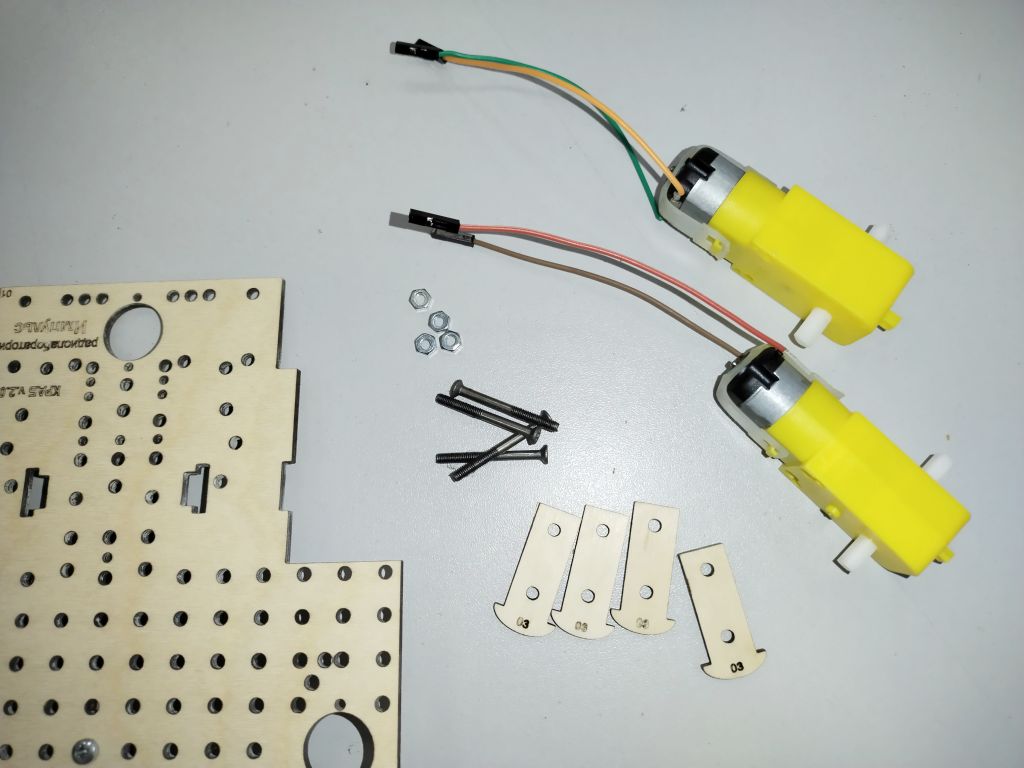
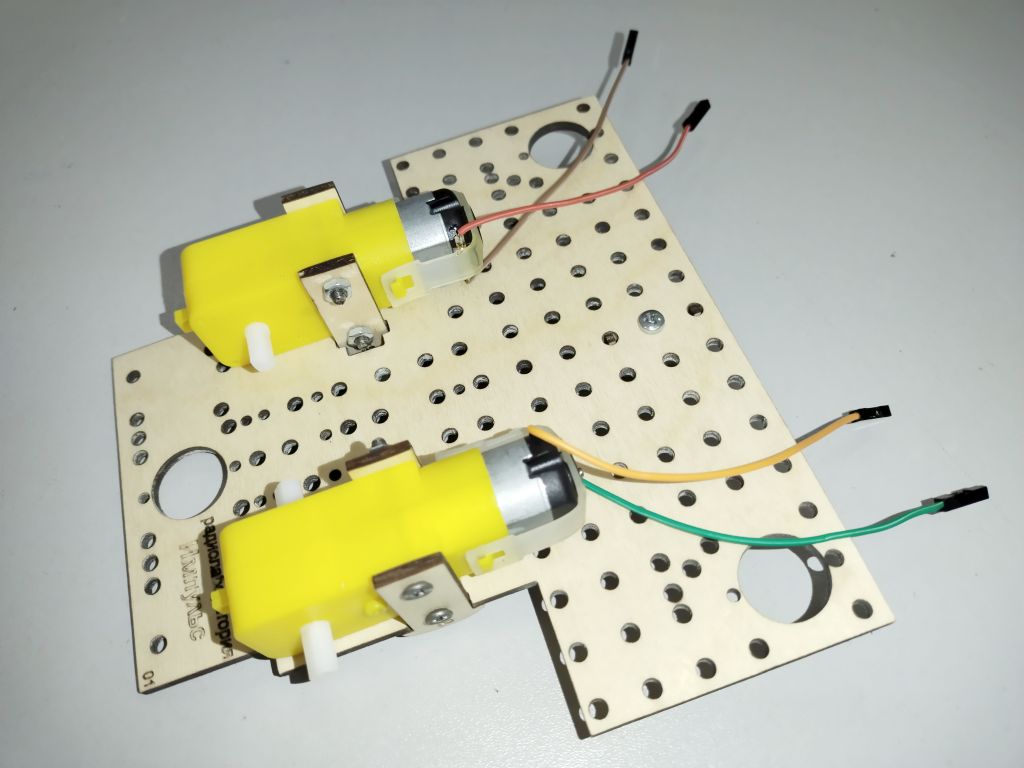
подготовить моторы - припаять к ним провода питания. Для этого, необходимо взять
две перемычки "гнездо-штекер", отрезать штекера, зачистить и залудить провода и
припаять их к контактам мотора:
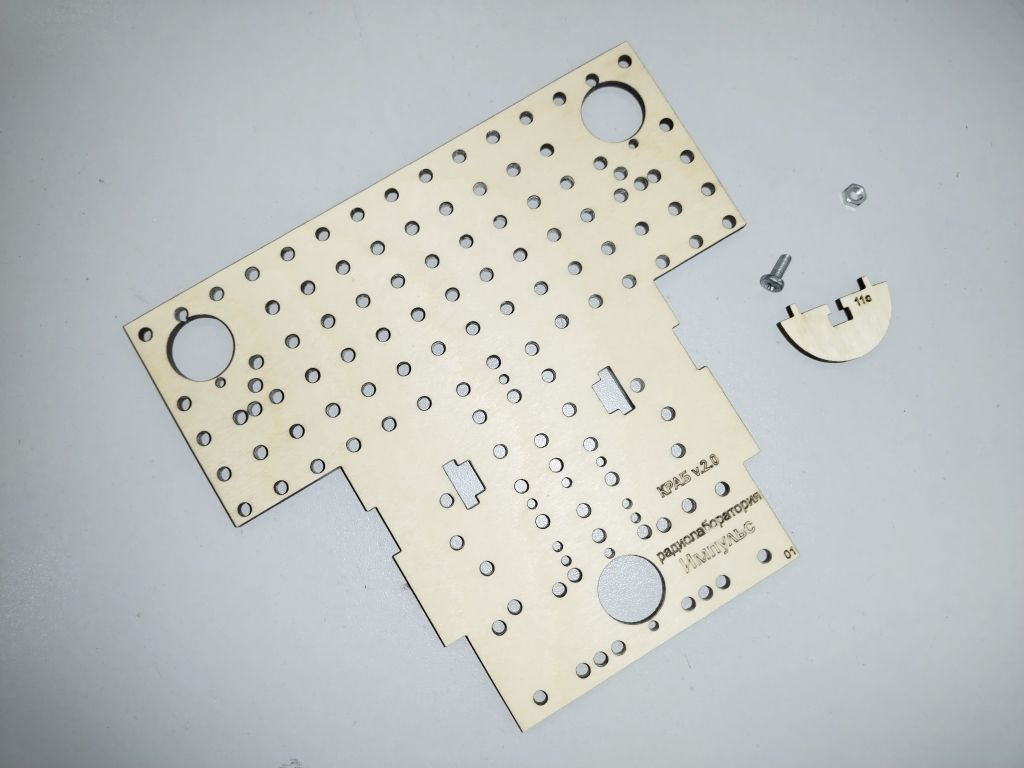
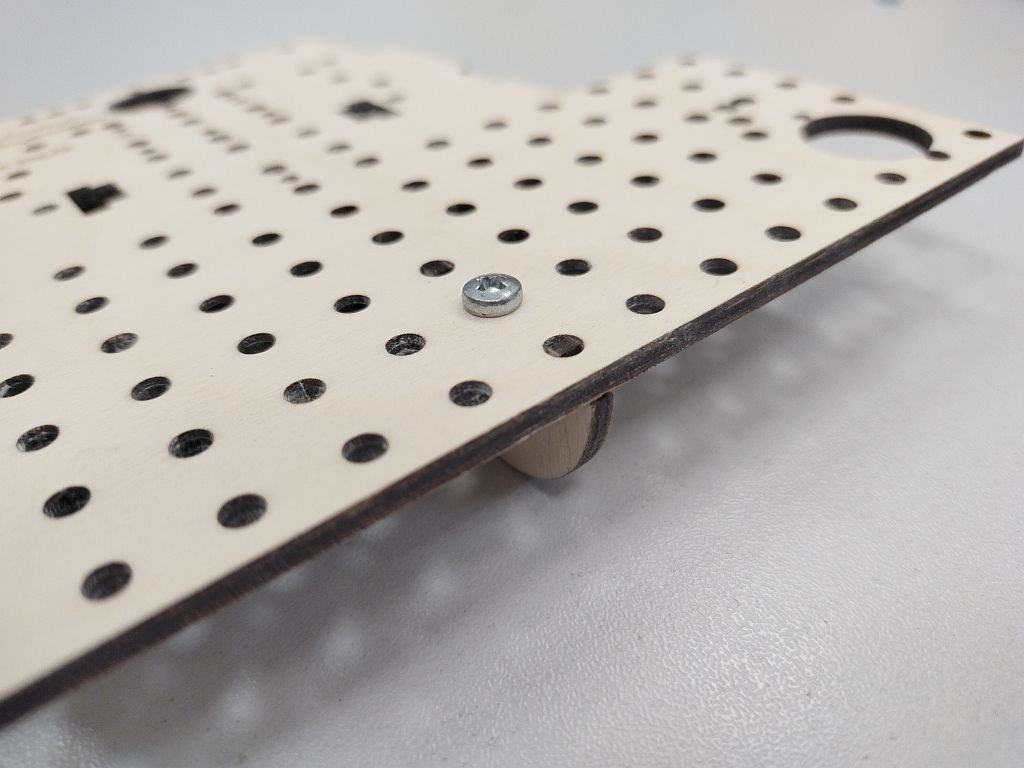
Теперь можно приступить к сборке платформы. Сначала нужно взять основную плату 01
и установить опору 11с, закрепив ее при помощи винта (М3, длина резьбы 8 мм) и
гайки, как показано на рисунке:

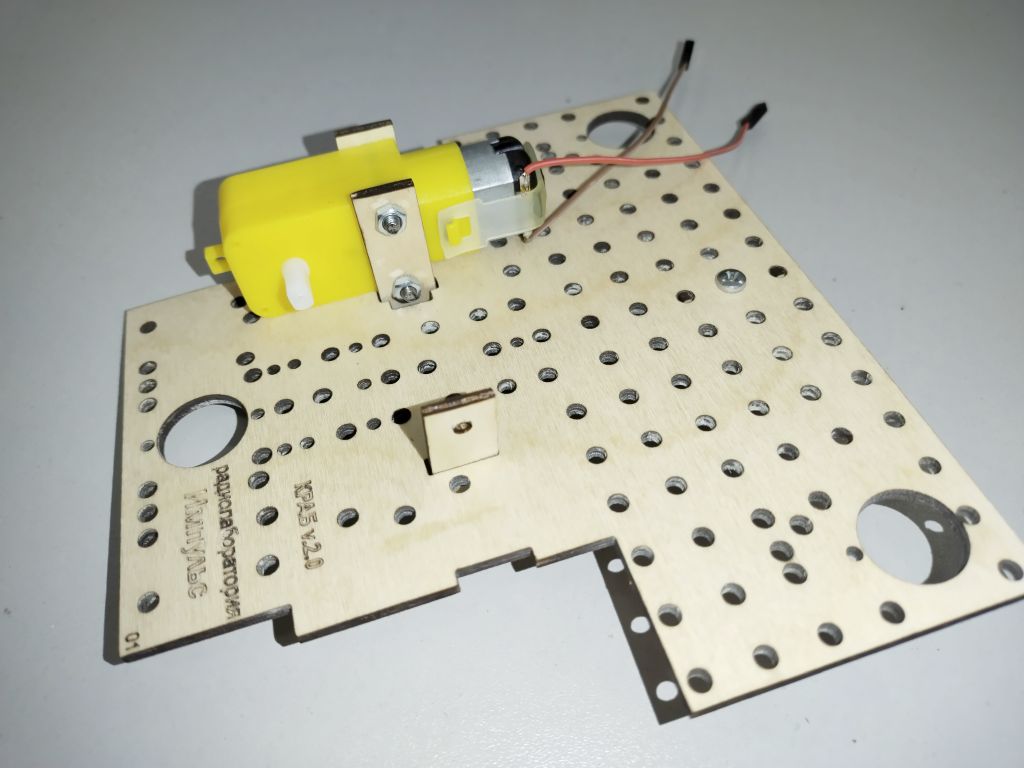
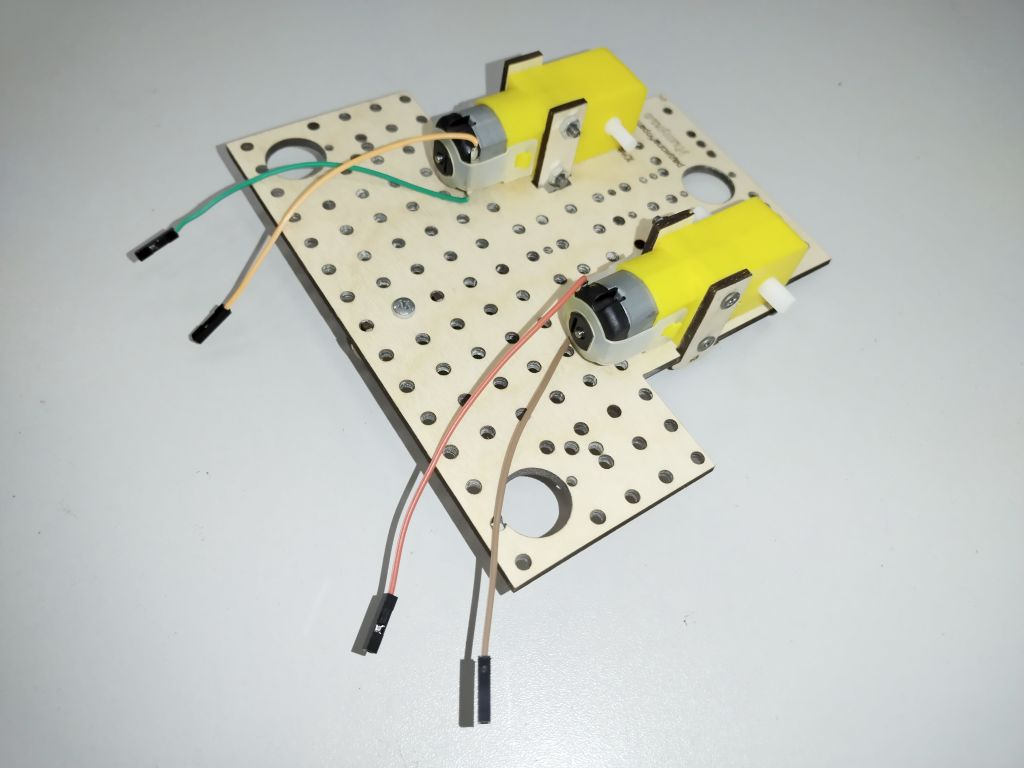
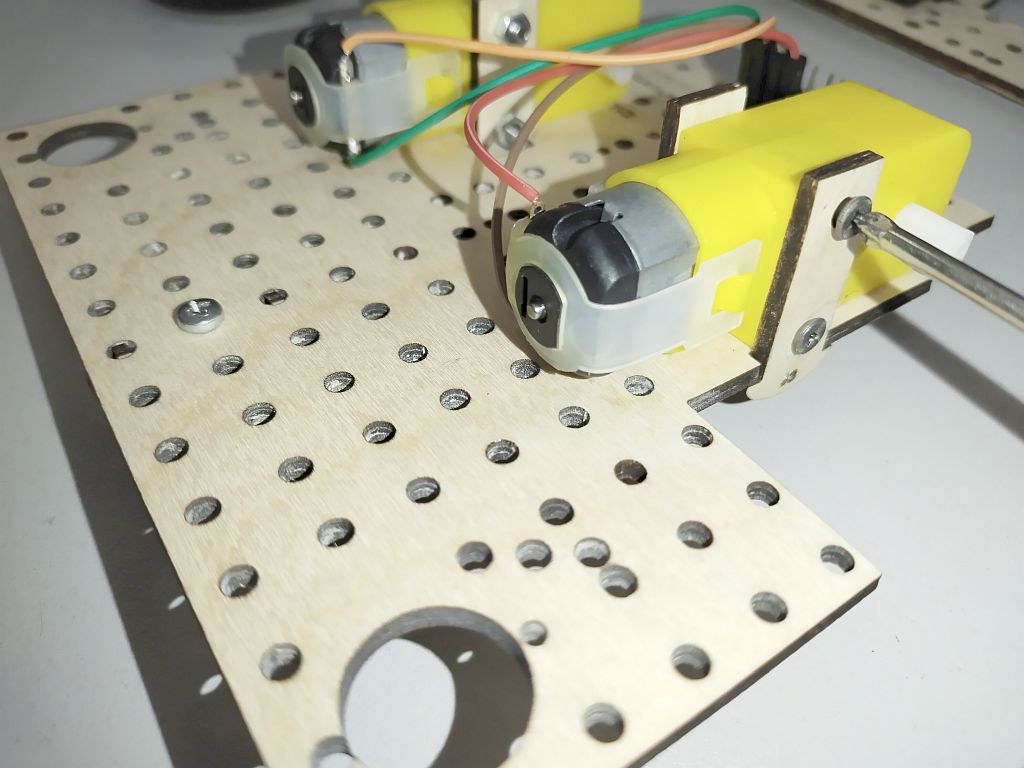
Теперь необходимо установить двигатели на платформу, для этого потребуются четыре
крепления 03 (по два крепления на каждый мотор), четыре винта (М3, длина резьбы 28
мм). Устанавливаем двигатели на плату:
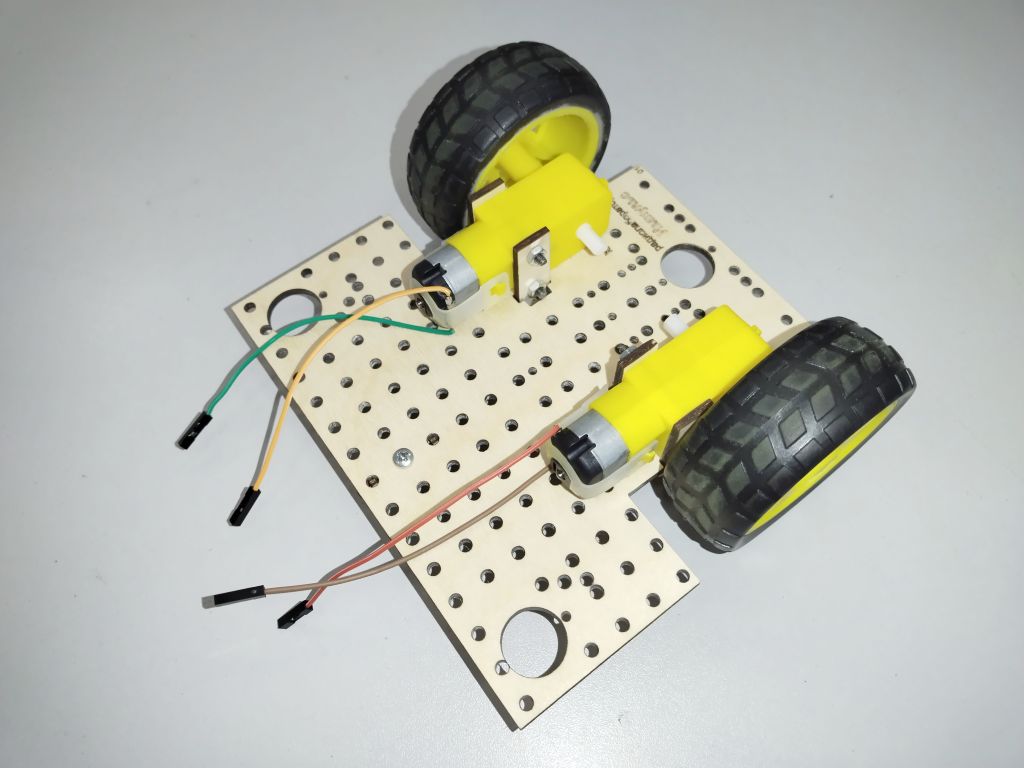
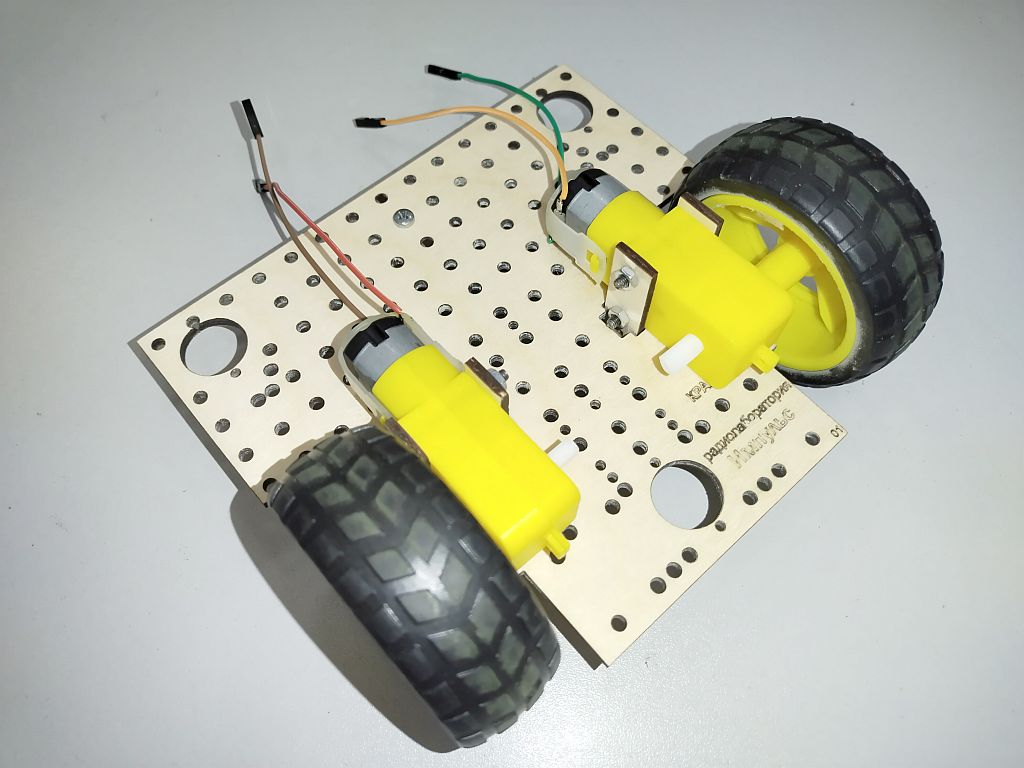
Осталось поставить колеса и платформа готова:
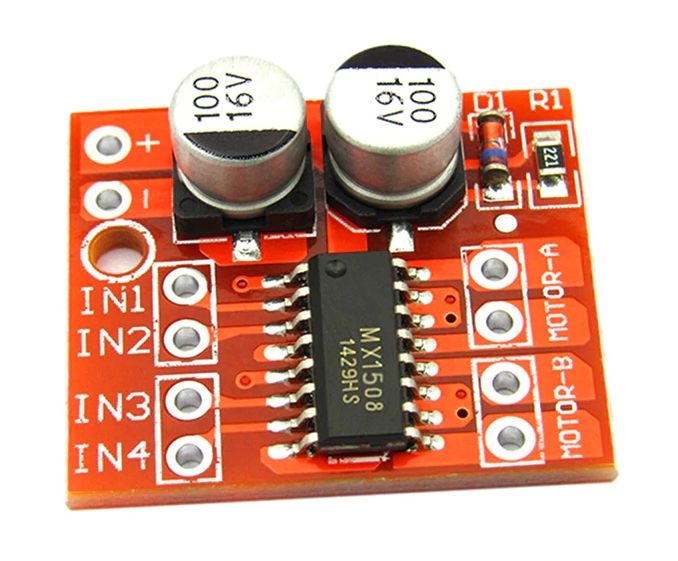
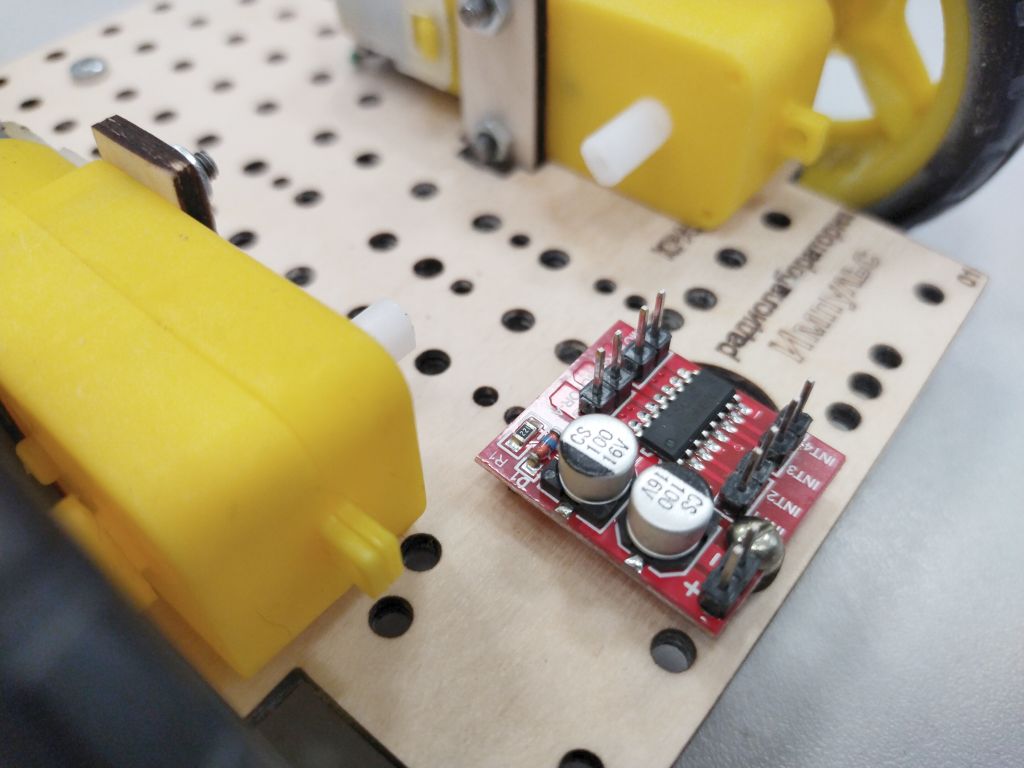
Установка драйвера двигателя
Для нашего робота мы будем использовать
Драйвер двигателя на микросхеме MX1508.
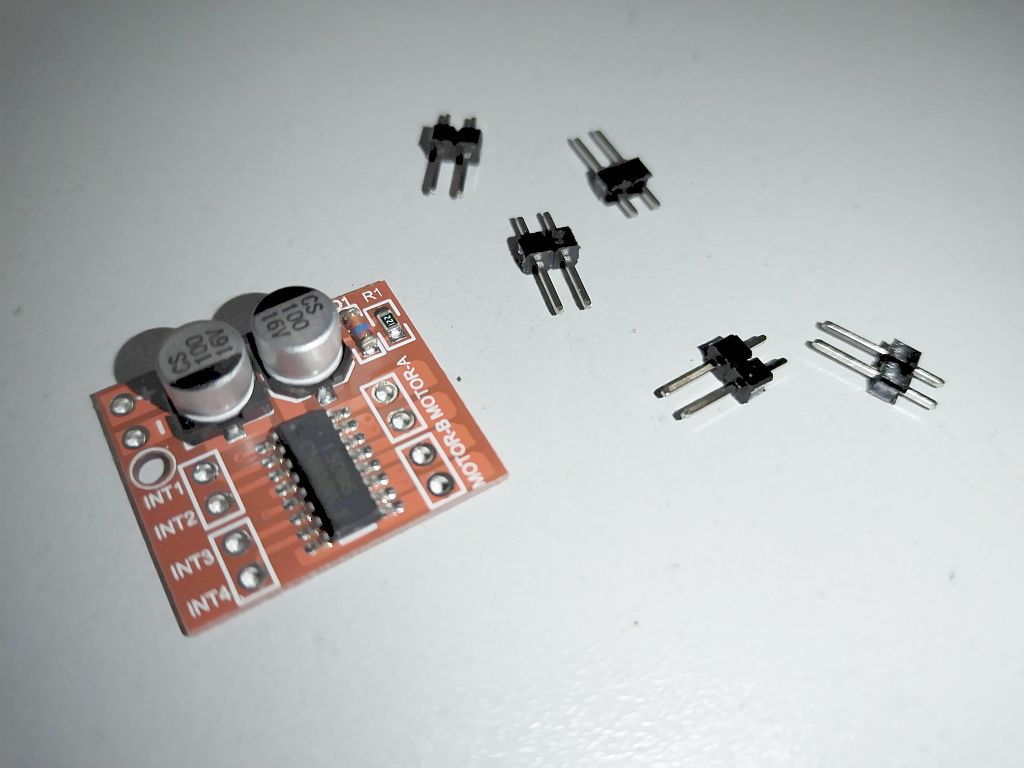
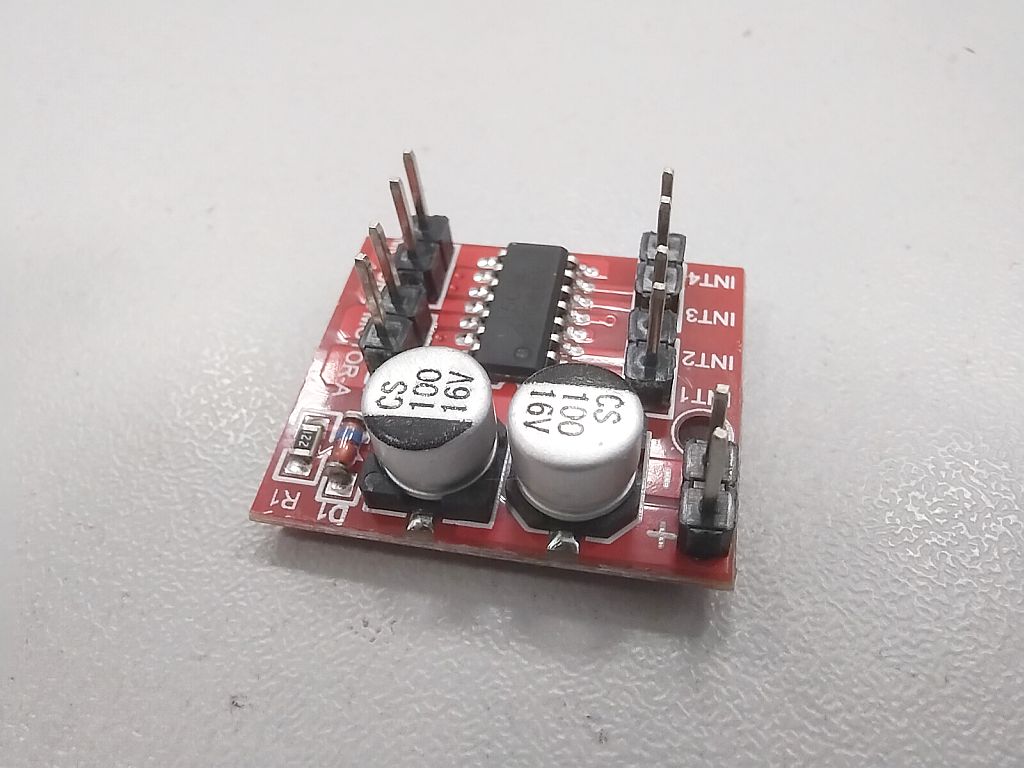
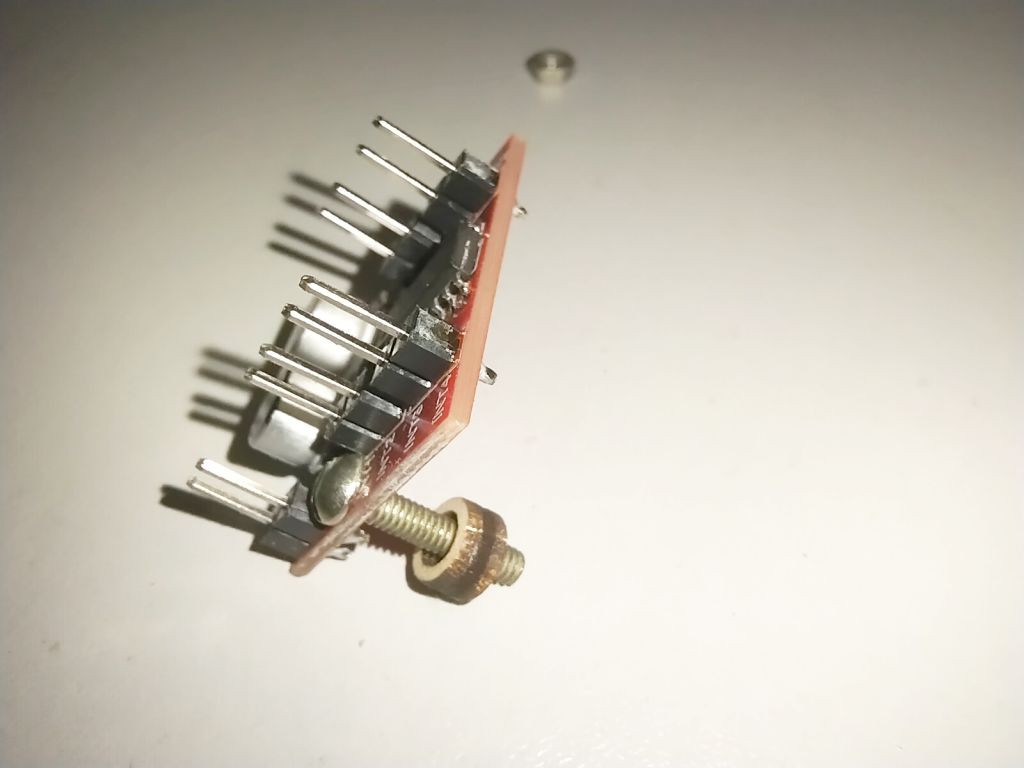
Сначала плату драйвера необходимо подготовить – установив на нее разъемы для
подключения:
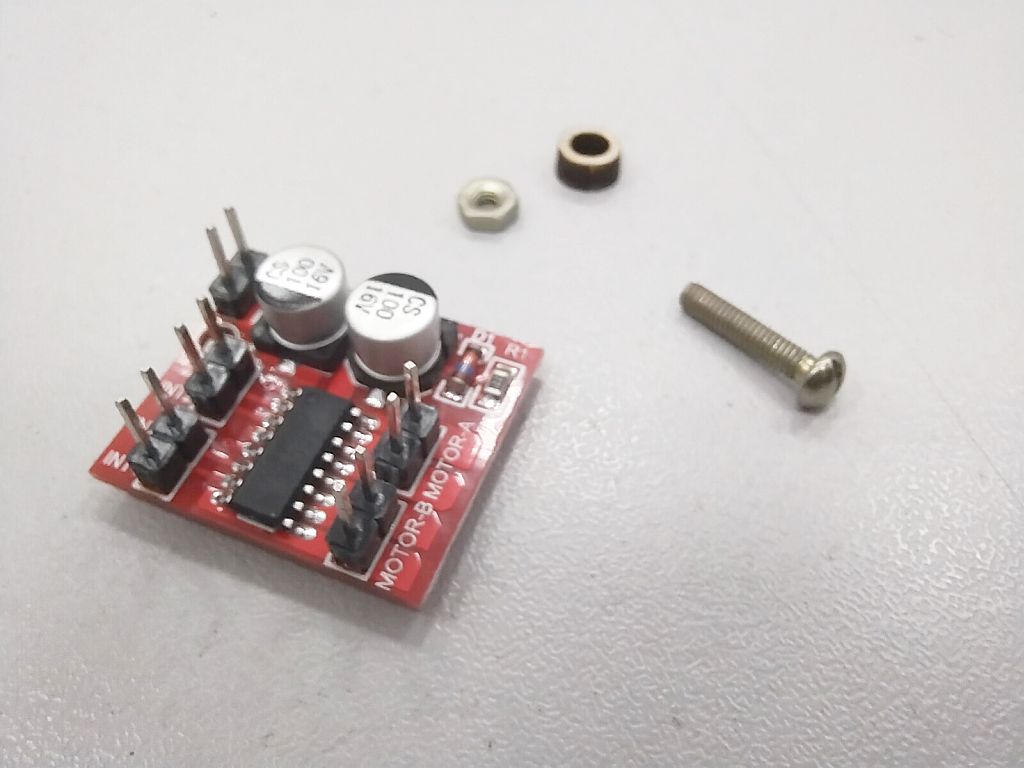
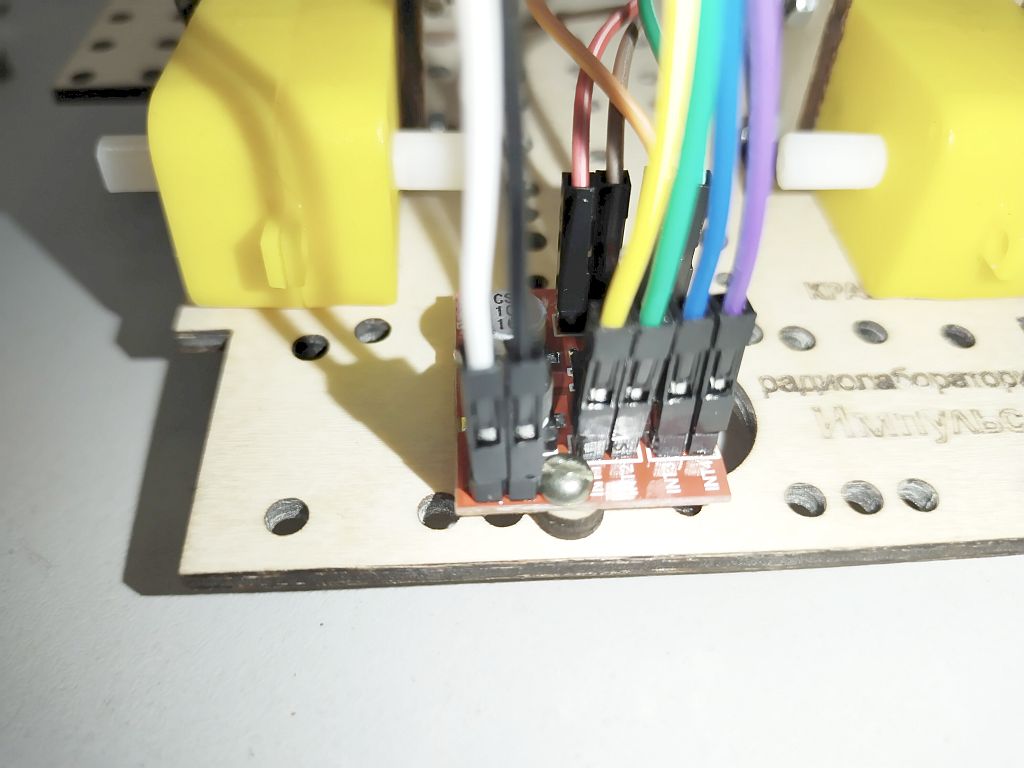
Далее необходимо закрепить плату драйверов на основной плате при помощи одного
винта (М2, длина резьбы 12 мм), обязательно подложив между платой драйвера и
основной платой шайбу:
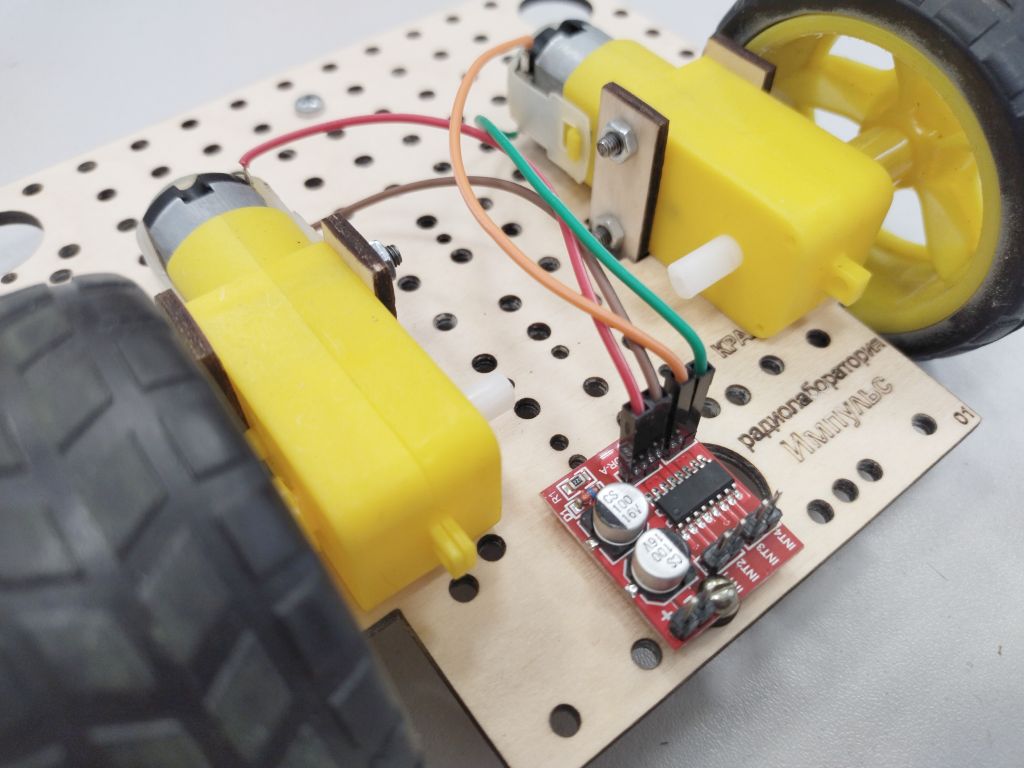
Подключаем моторы к плате драйверов согласно схеме:
На этом сборка первой части робота закончена. Приступаем к сборке второй части.
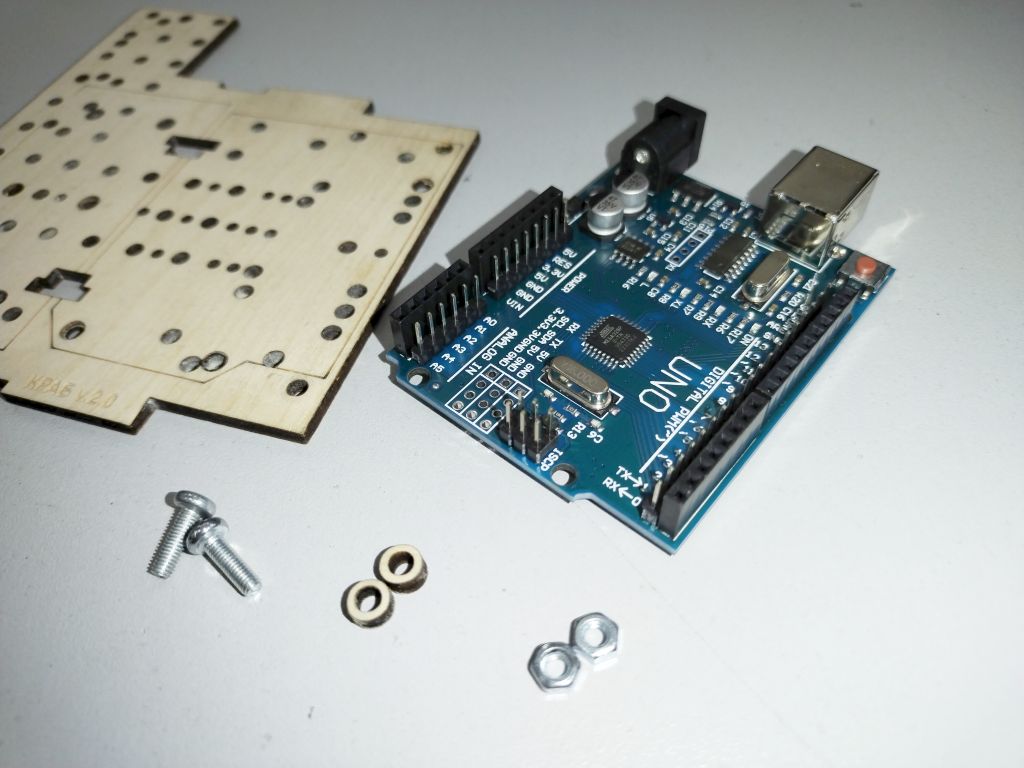
Установка контроллера Arduino
Мозгом робота является контроллер
Arduino UNO R3. Плату контроллера также нужно подготовить. В комплекте с
контроллером есть разъем – его необходимо запаять на плату:



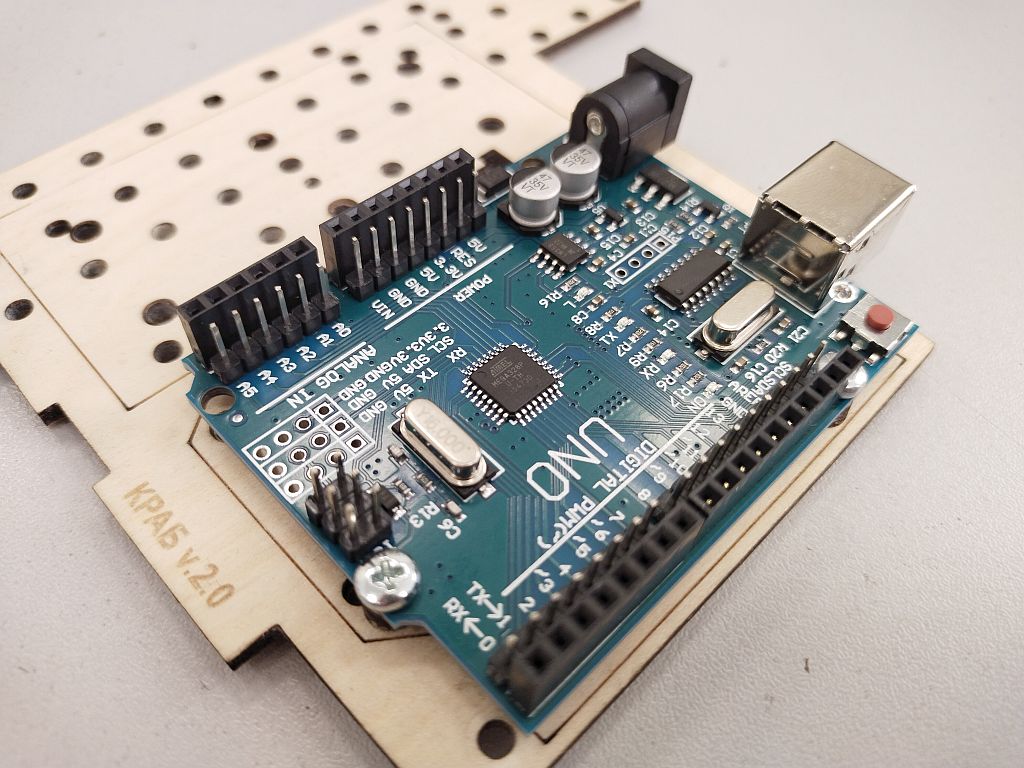
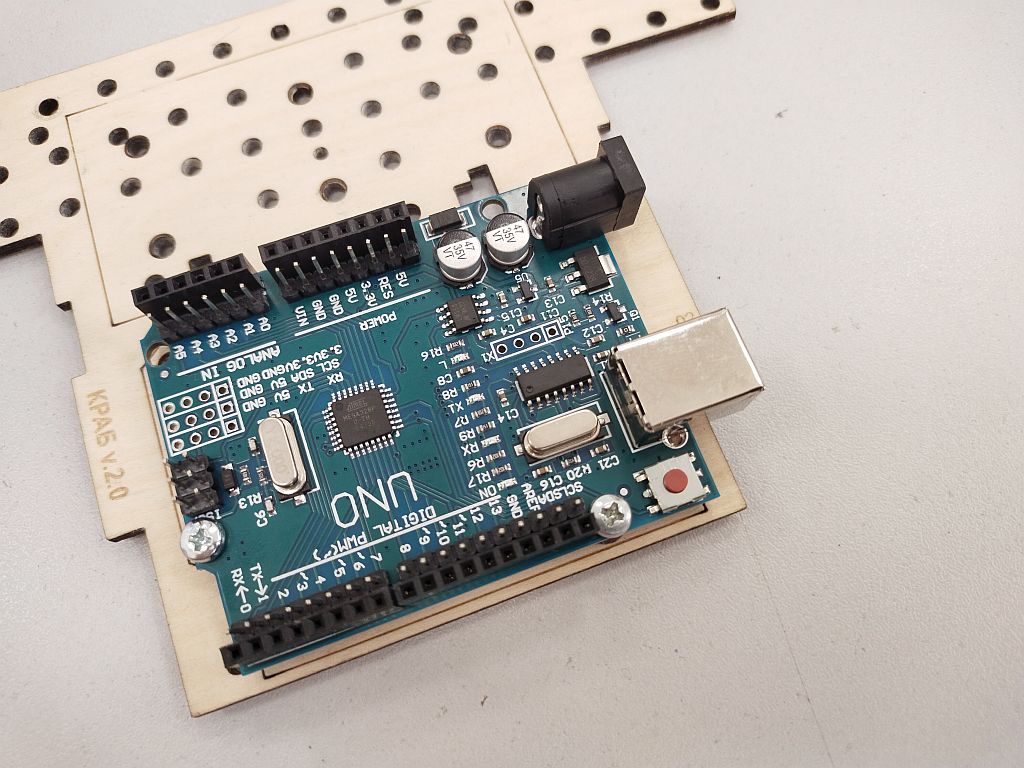
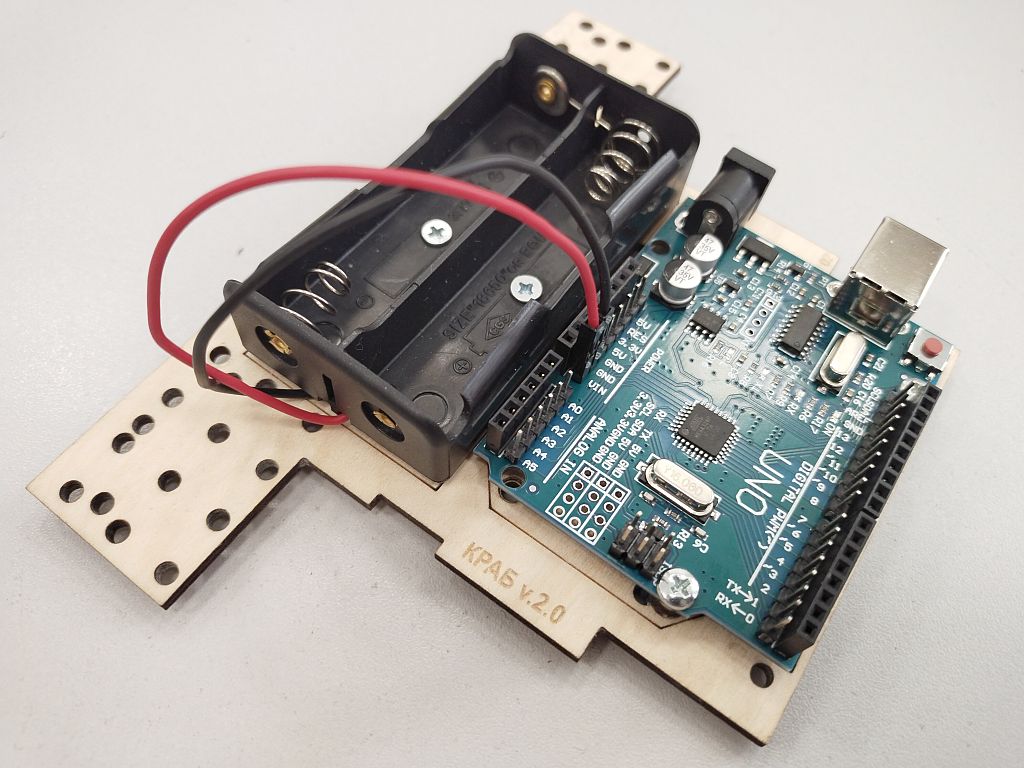
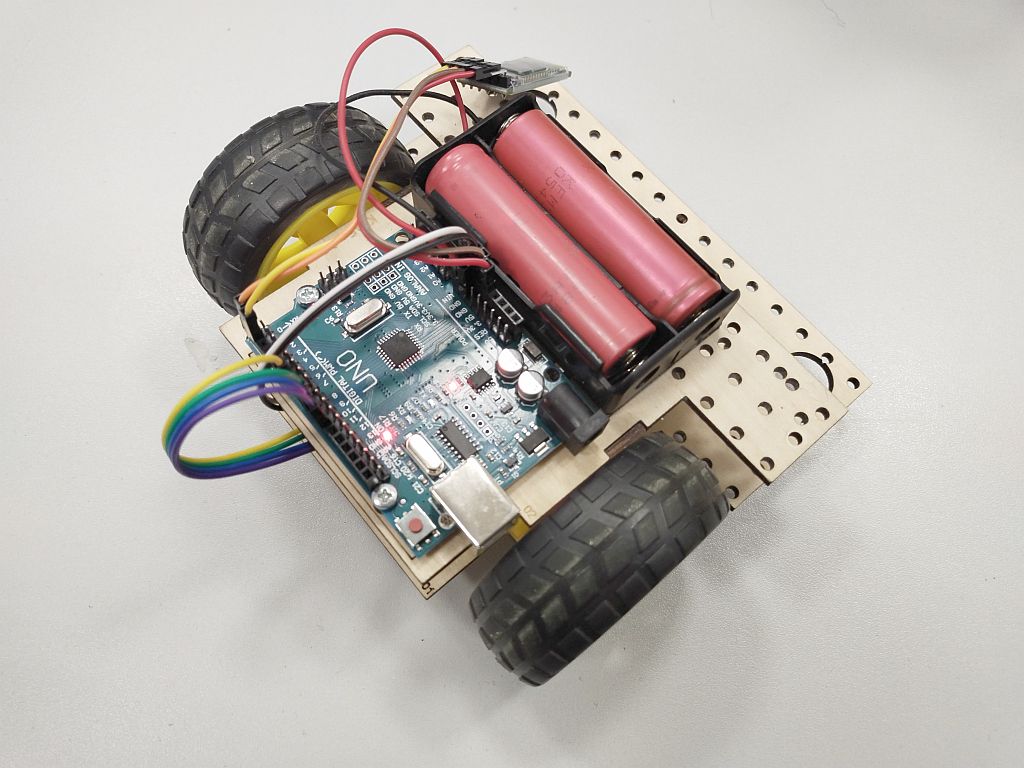
Теперь необходимо установить плату, закрепив ее на малой плате 02, используя два
винта (М3, длина резьбы 12 мм), две шайбы и две гайки, как показано на фото:
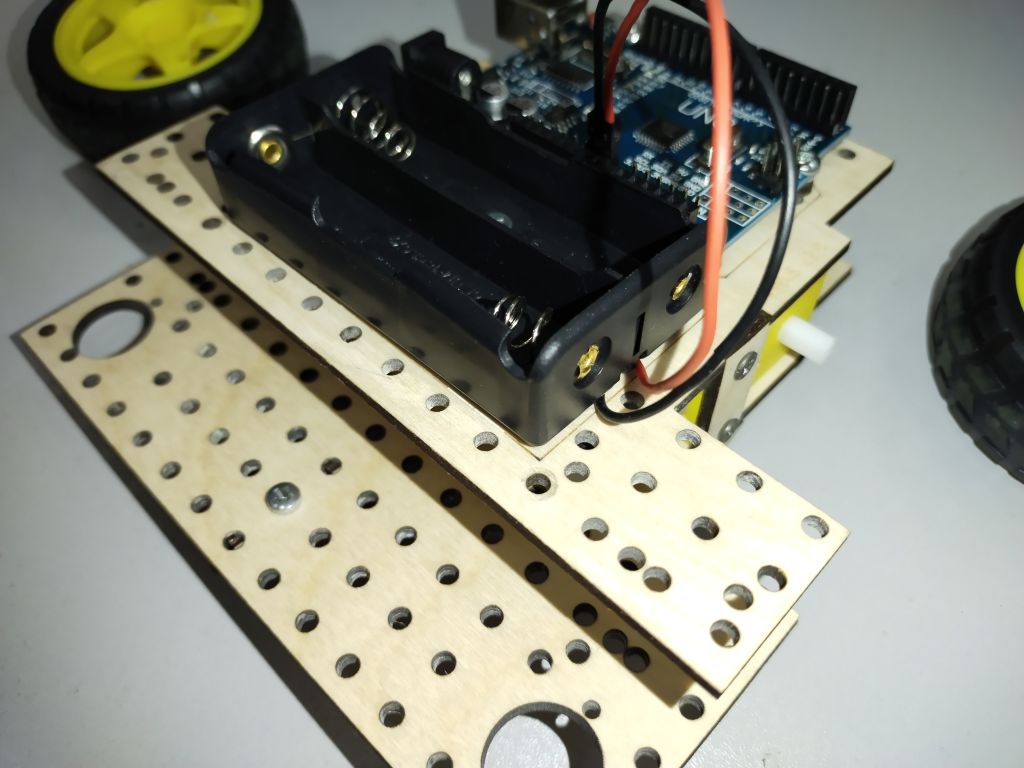
Установка батарейного отсека.
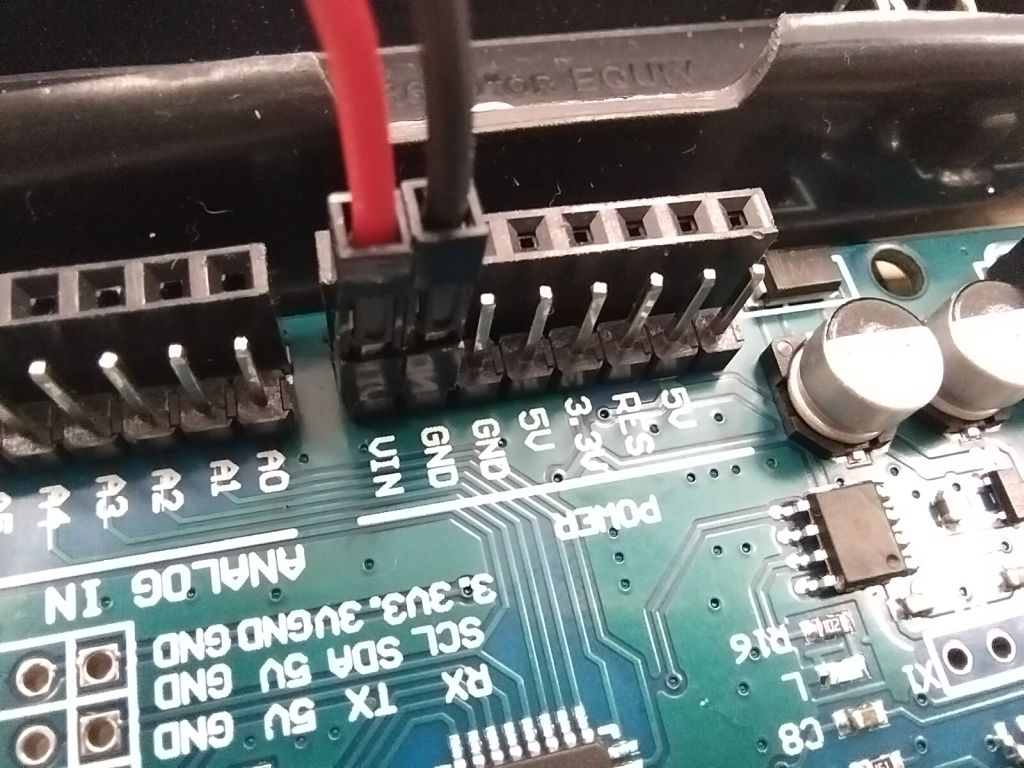
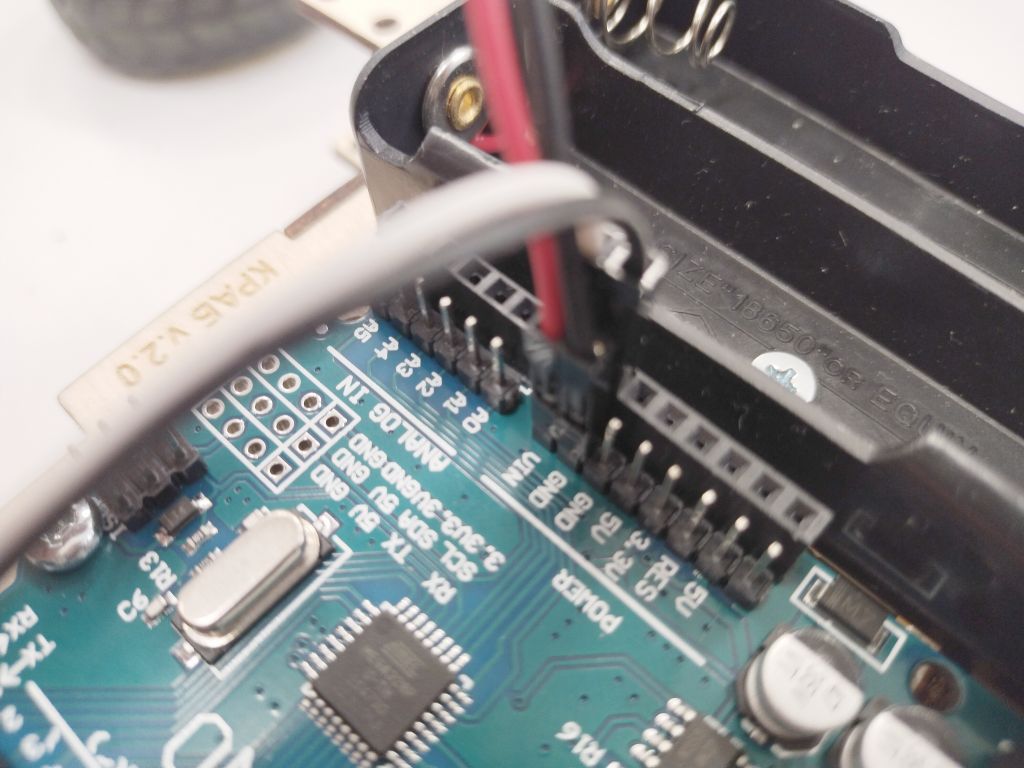
Источником питания робота, являются два аккумулятора 18650, устанавливаемые в батарейный отсек. Батарейный отсек устанавливается на малой плате 02 и закрепляется с помощью двух винтов с потайной головкой (М3, длина резьбы 8 мм).
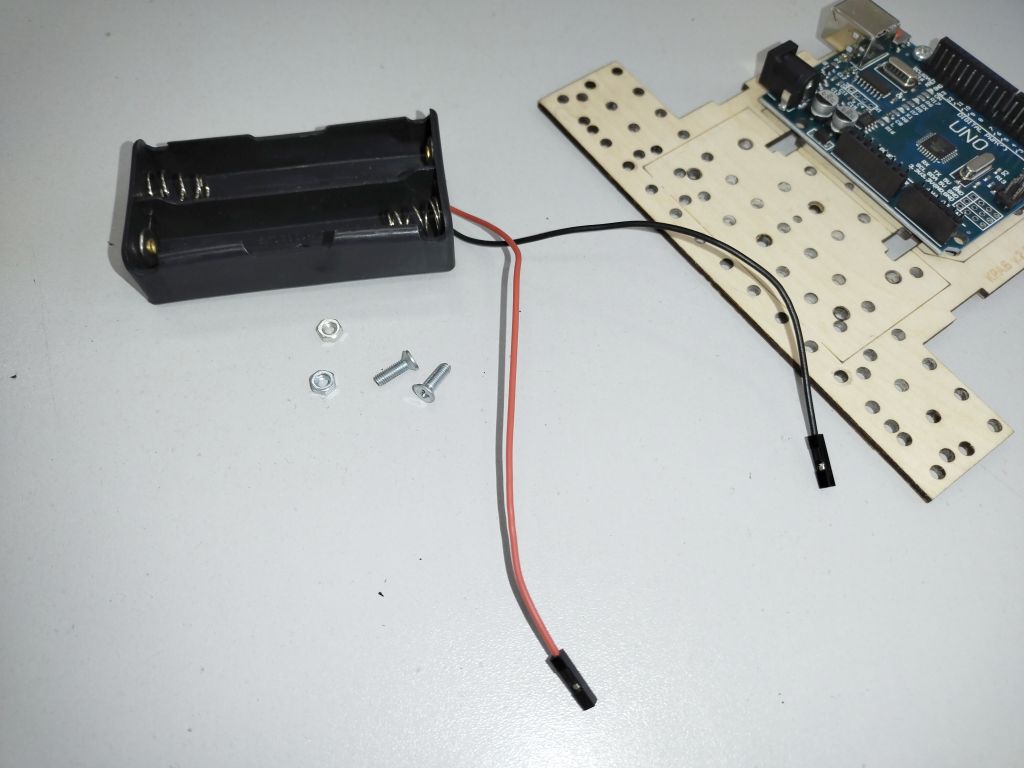
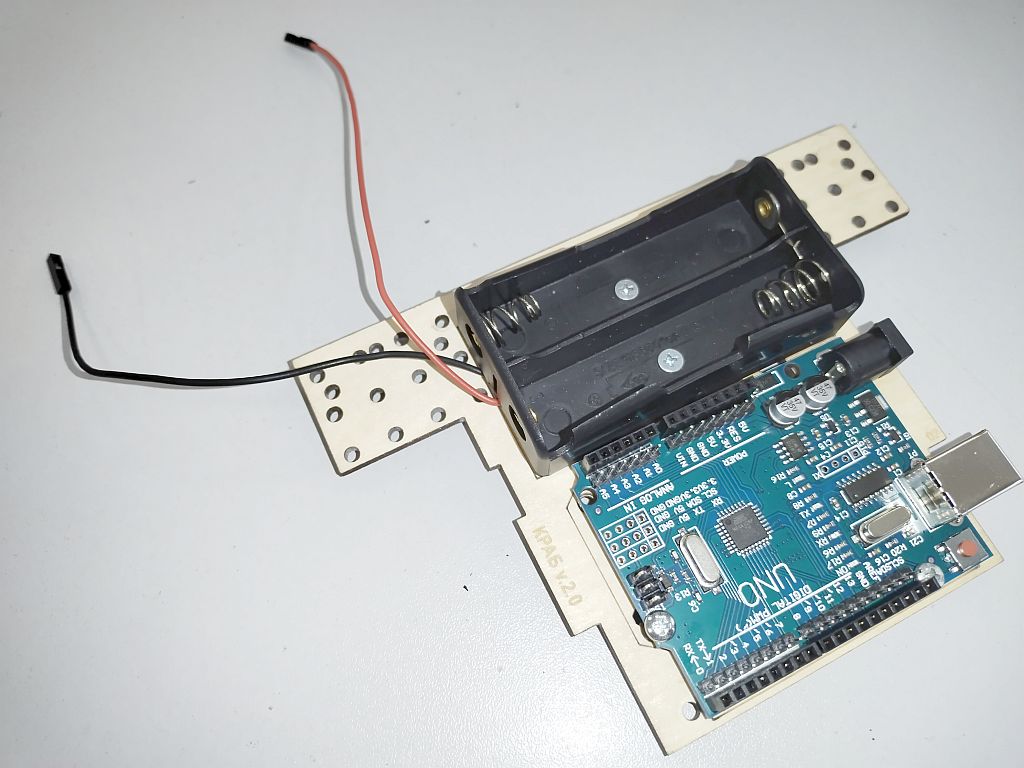
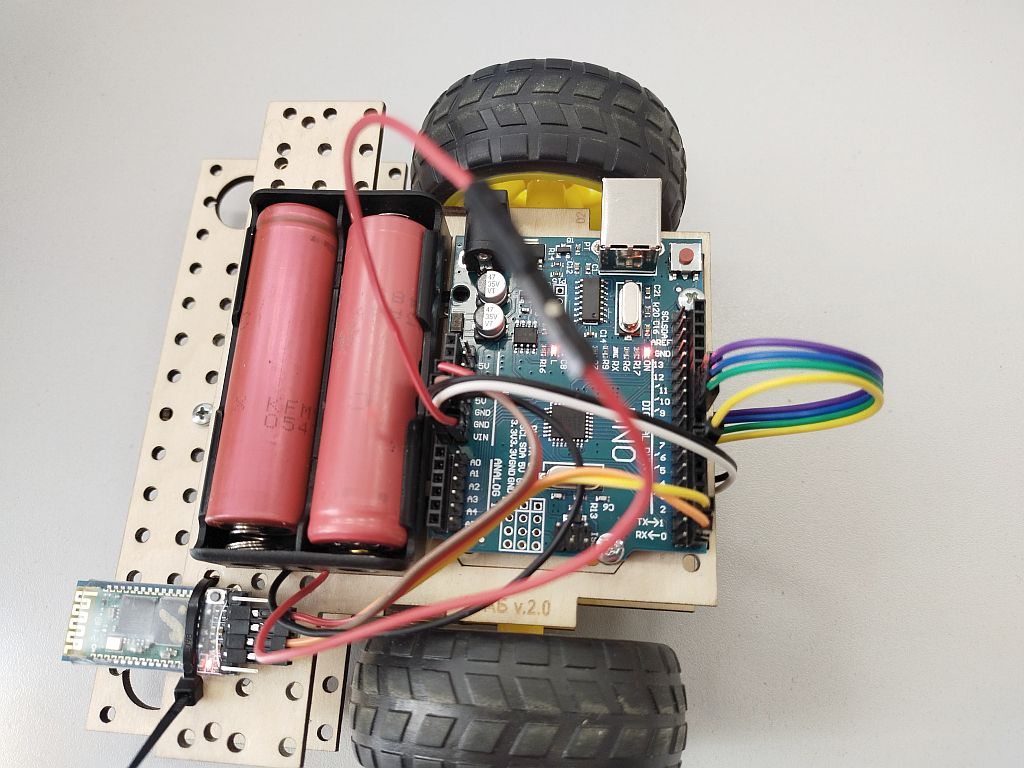
Батарейный отсек подключается к плате контроллера согласно схеме:
Сборка робоплатформы
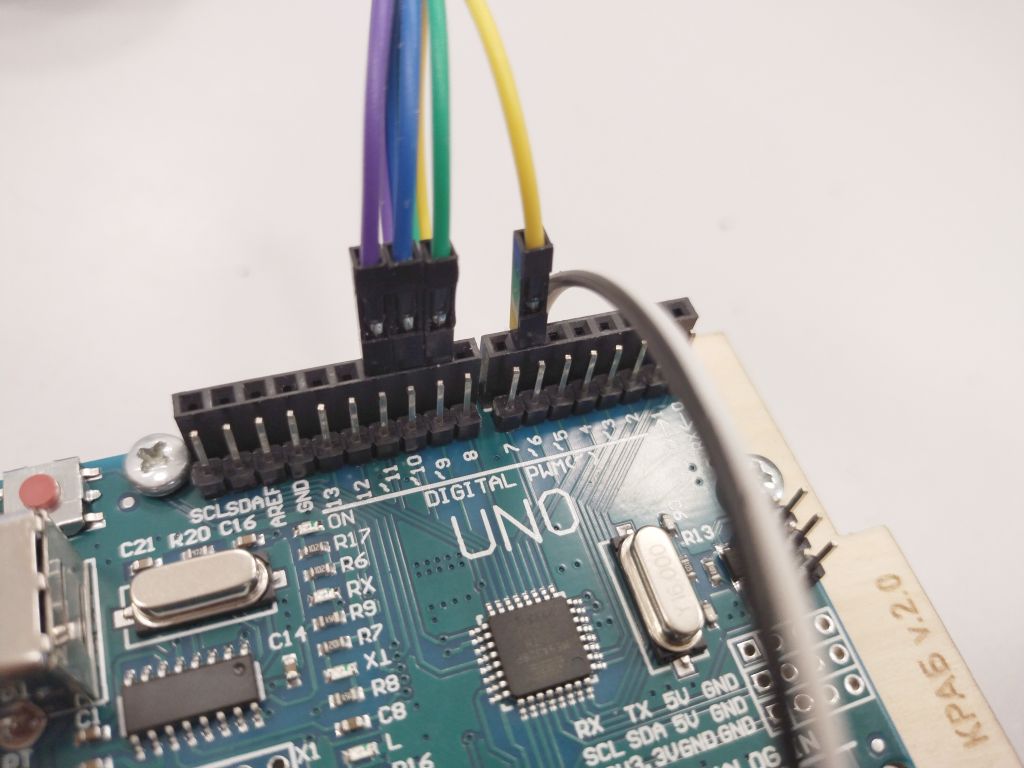
Сначала необходимо электрически соединить обе части робота, согласно схеме:
Затем необходимо соединить обе части механически, для этого следует ослабить
верхние винты крепления двигателей 03 (перед этим необходимо снять колеса),
соединить обе части робота и затянуть верхние винты крепления двигателей.
Если все собрано правильно, то можно приступить к программированию робота.
Программирование робота
Напишем простую программу, в соответствии с которой робот будет двигаться прямо в течении одной секунды, останавливаться на одну секунду, поворачивать направо в течении 0.7 секунды, опять останавливаться на секунду и далее процесс будет повторяться. Вот код:
/* Робот */
void setup() {
pinMode(11, OUTPUT);
pinMode(10, OUTPUT);
pinMode(9, OUTPUT);
pinMode(6, OUTPUT);
}
void loop() {
digitalWrite(6, HIGH); digitalWrite(9, LOW); // Двигаться вперед
digitalWrite(10, HIGH); digitalWrite(11, LOW); //
delay(1000); // в течении одной секунды
digitalWrite(6, LOW); digitalWrite(9, LOW); // Остановиться
digitalWrite(10, LOW); digitalWrite(11, LOW); //
delay(1000); // на одну секунду
digitalWrite(6, HIGH); digitalWrite(9, LOW); // Повернуть на право
digitalWrite(10, LOW); digitalWrite(11, LOW); //
delay(700); // поворот в течении 0,7 секунд
digitalWrite(6, LOW); digitalWrite(9, LOW); // Остановиться
digitalWrite(10, LOW); digitalWrite(11, LOW); //
delay(1000); // на одну секунду
}
А вот видео как это работает:
Робот, управляемый по Bluetooth
Этот робот может быть использован для соревнований типа "Футбол роботов",
"Захват флага" или любых других, где требуется управляемый робот.
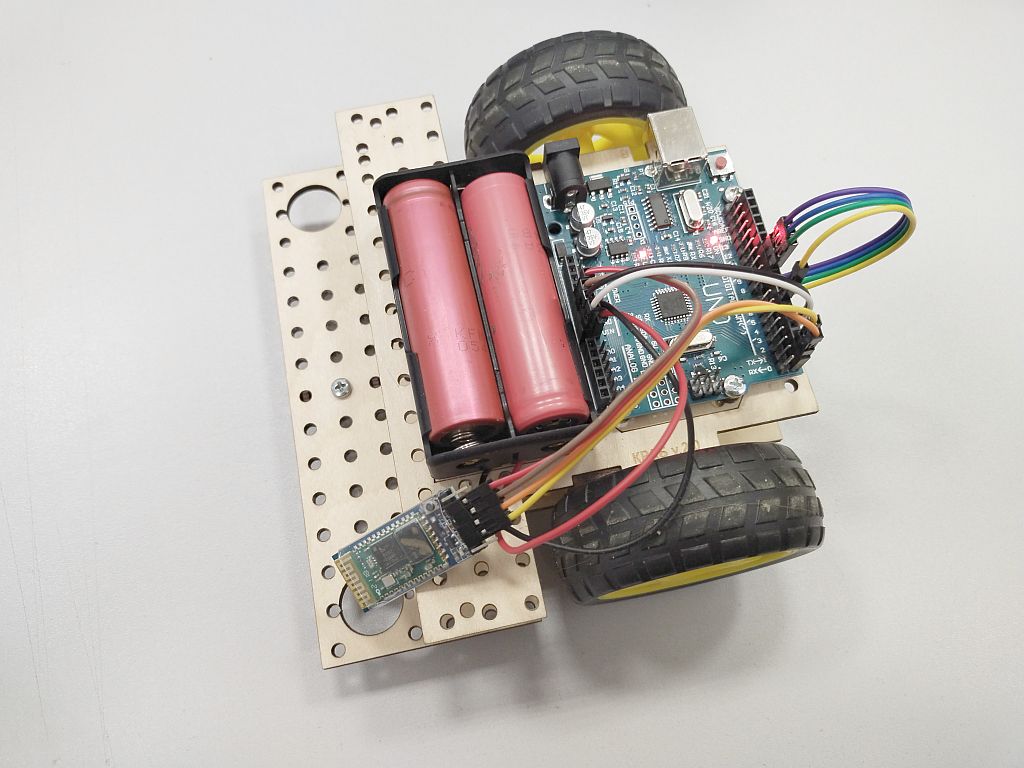
Управление осуществляется с мобильного телефона по Bluetooth. Для этого необходимо
добавить в нашу схему еще один модуль - Bluetooth HC-05. Но прежде чем подключать
модуль робота необходимо запрограммировать, а на телефон установить программу
управления роботом. Все необходимое есть в файле: krab1.zip.
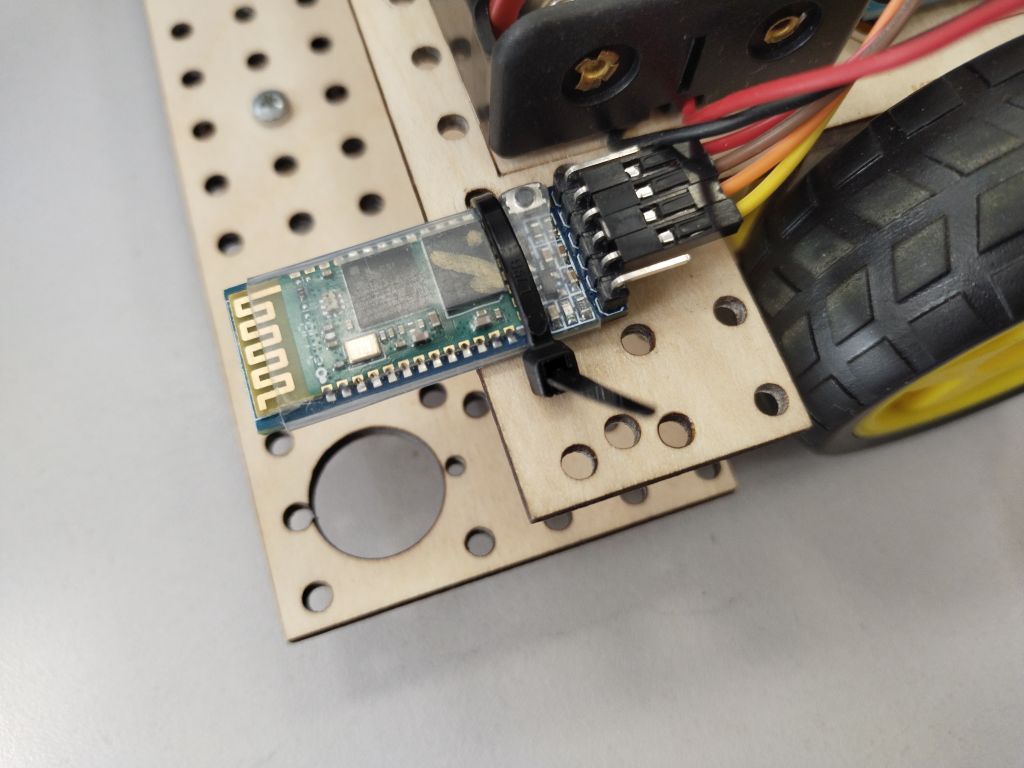
После того как программа загружена в робота - можно подключать модуль Bluetooth HC-05:
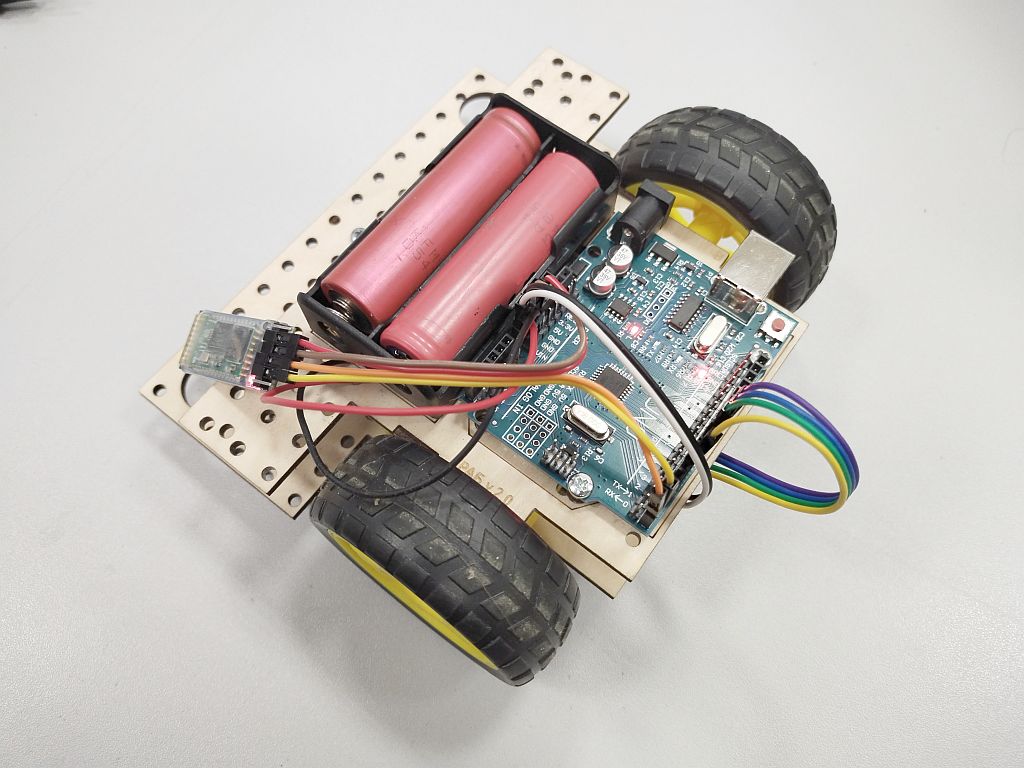
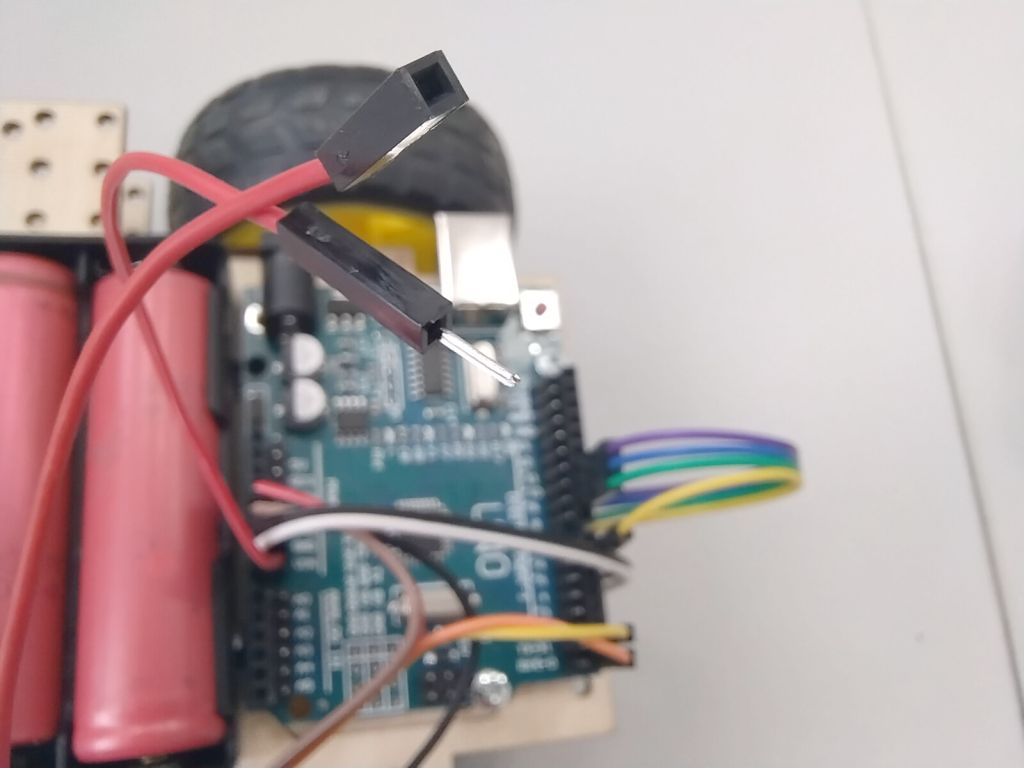
Для включения робота удобнее использовать еще одну перемычку штеккер-гнездо,
как показано на фото:
Bluetooth модуль может быть закреплен на малой панели при помощи пластиковой
стяжки.
Дополнительные материалы
Copyright © R9AL 2023 Все права защищены