
В данной конструкции используется беспроводной джойстик от PlayStation-2.
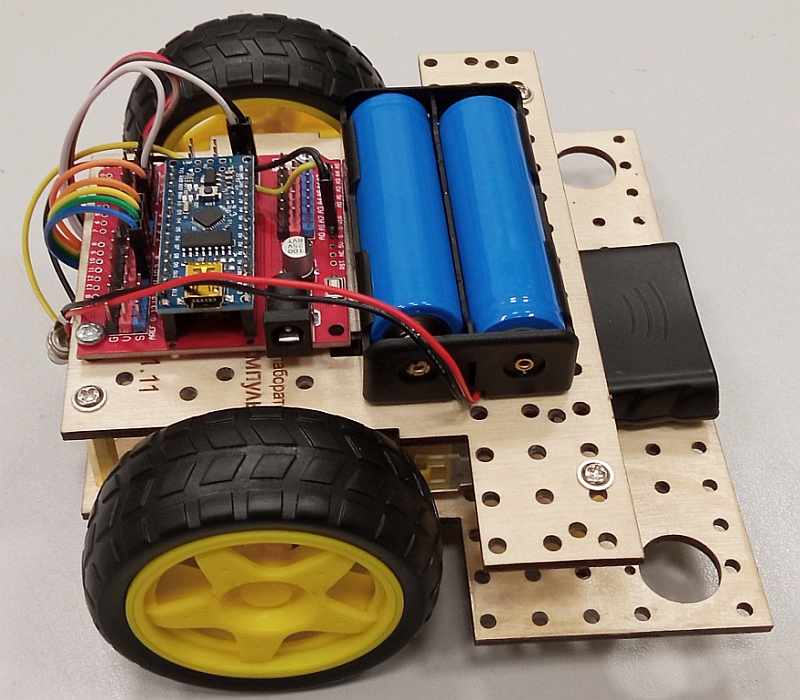
Сборка робота:Фотоинструкция по сборке
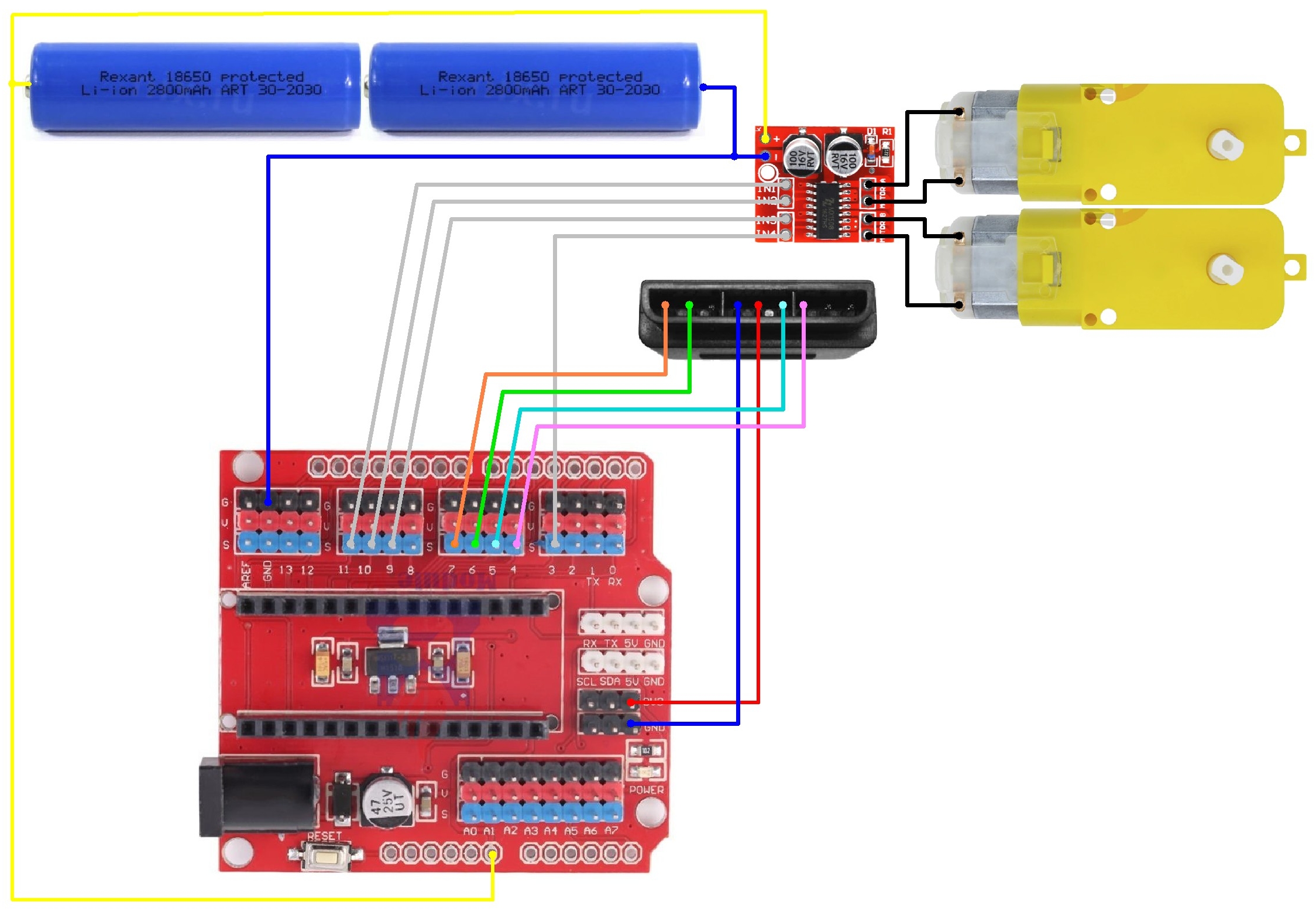
Принципиальная схема робота:
Монтажная схема робота:
Скетч:
#include < PS2X_lib.h>
// пины к которым подключен PS2 джойстик:
#define PS2_DAT 7 //data
#define PS2_CMD 6 //command
#define PS2_SEL 5 //attention
#define PS2_CLK 4 //clock
// выбираем режимы PS2 контроллера:
#define pressures true // pressures = аналоговое считывание нажатия кнопок
#define rumble true // rumble = вибромоторы
// пины к которым подключен драйвер моторов:
#define motorLF 9 //L-Forward
#define motorLB 3 //L-Back
#define motorRF 10 //R-Forward
#define motorRB 11 //R-Back
PS2X ps2x; // создание класса для PS2 контроллера
int x,x1, y;
int Weight_Forward, Weight_Back, Weight_Left, Weight_Right,Weight_Left1, Weight_Right1 ; //Веса для езды
int consX = 127; //значения джосттика в среднем положении
int consY = 127;
void setup() {
delay(300); //добавляем паузу, чтобы дать беспроводному ps2 модулю время для включения
ps2x.config_gamepad(PS2_CLK, PS2_CMD, PS2_SEL, PS2_DAT, pressures, rumble);
pinMode(motorLF, OUTPUT);
pinMode(motorLB, OUTPUT);
pinMode(motorRF, OUTPUT);
pinMode(motorRB, OUTPUT);
}
void loop() {
ps2x.read_gamepad(); //считывание данных с контроллера
y = ps2x.Analog(PSS_LY);
x = ps2x.Analog(PSS_RX);
x1 = ps2x.Analog(PSS_LX);
analogWrite(motorLF, 0);
analogWrite(motorLB, 0);
analogWrite(motorRF, 0);
analogWrite(motorRB, 0);
//---------------------------------------------------------------
if ((y < consY) && (consY - y > 3)) {
Weight_Forward = map(y, 127, 0, 0, 255);
} else {
Weight_Forward = 0;
}
if ((y > consY) && (y - consY > 3)) {
Weight_Back = map(y, 127, 255, 0, 255); //преобразование значений геймпада в вес
} else {
Weight_Back = 0;
}
if ((x < consX) && (consX - x > 3)) {
Weight_Left = map(x, 127, 0, 0, 255);
} else {
Weight_Left = 0;
}
if ((x > consX) && (x - consX > 3)) {
Weight_Right = map(x, 127, 255, 0, 255);
} else {
Weight_Right = 0;
}
if ((x1 < consX) && (consX - x1 > 3)) {
Weight_Left1 = map(x1, 127, 0, 0, 255);
} else {
Weight_Left1 = 0;
}
if ((x1 > consX) && (x1 - consX > 3)) {
Weight_Right1 = map(x1, 127, 255, 0, 255);
} else {
Weight_Right1 = 0;
}
//-----------------------------------------------------------------
if (Weight_Forward - (Weight_Left / 1.5) > 0) {
analogWrite(motorLF, Weight_Forward - (Weight_Left / 1.5));
}
//-----------------------------------------------------------------
if ( Weight_Back - (Weight_Right / 1.5) > 0) {
analogWrite(motorLB, Weight_Back - (Weight_Right / 1.5));
}
//-----------------------------------------------------------------
//распределение весов на моторы
//-----------------------------------------------------------------
if (Weight_Forward - (Weight_Right / 1.5) > 0) {
analogWrite(motorRF, Weight_Forward - (Weight_Right / 1.5));
}
//-----------------------------------------------------------------
if (Weight_Back - (Weight_Left / 2) > 1.5) {
analogWrite(motorRB, Weight_Back - (Weight_Left / 1.5));
}
//-----------------------------------------------------------------
if (Weight_Forward == 0 && Weight_Back == 0) {
if (Weight_Left > 0) {
analogWrite(motorRF, Weight_Left);
analogWrite(motorLB, Weight_Left); //разворот на месте
}
if (Weight_Right > 0) {
analogWrite(motorLF, Weight_Right);
analogWrite(motorRB, Weight_Right);
}
}
if (Weight_Left1 > 0) {
analogWrite(motorRF, Weight_Left1);
//разворот на месте
}
if (Weight_Right1 > 0) {
analogWrite(motorLF, Weight_Right1);
}
Serial.println(" ");
delay(10);
}
Файлы:
Copyright © R9AL 2022 Все права защищены
