
Это учебный робот, для демонстрации принципа движения вдоль линии.
Для изготовления этого роботы был использован
робот "Мотылек", в схему которого внесены
некоторые изменения, поэтому инструкция по сборке не приводится.
В конструкции робота использован только один датчик освещенности.
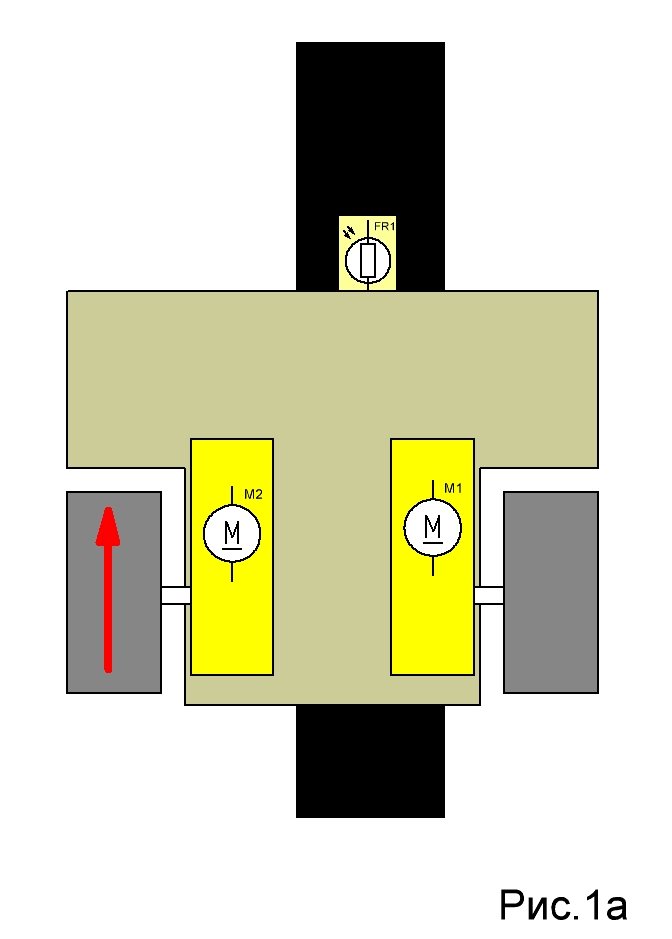
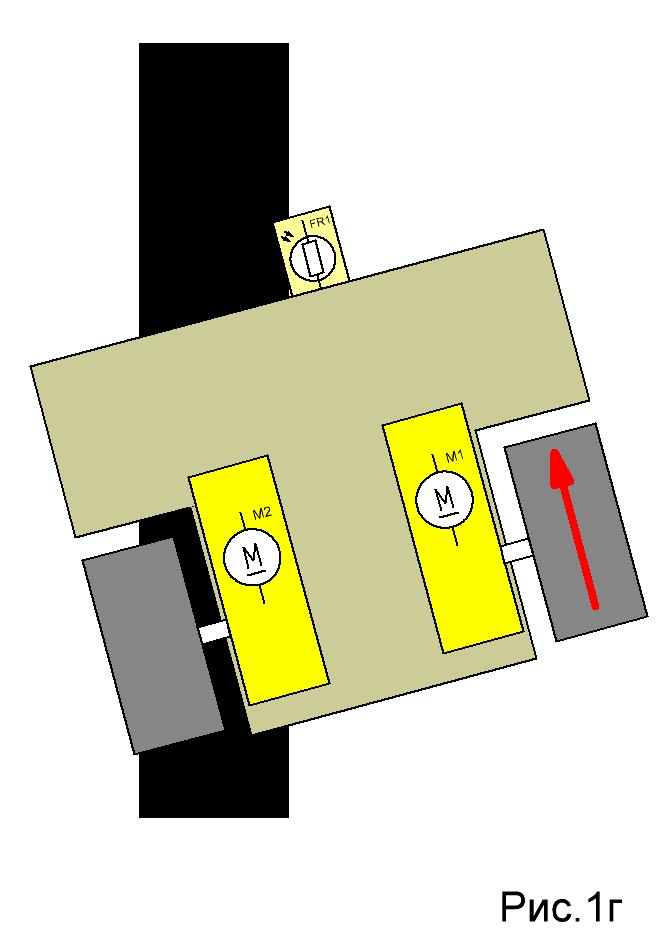
Алгоритм движения робота вдоль черной линии с одним датчиком.
В передней части робота, по центру устанавливается датчик освещенности.

Если датчик находится над черной линией (рис.1а), то робот будет стараться с нее съехать (рис.1б),
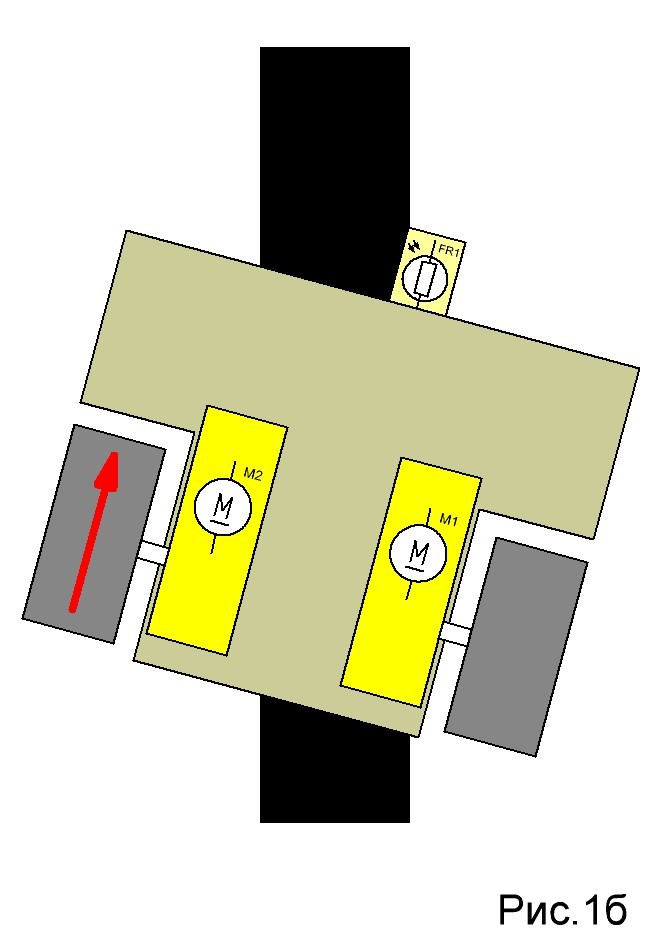
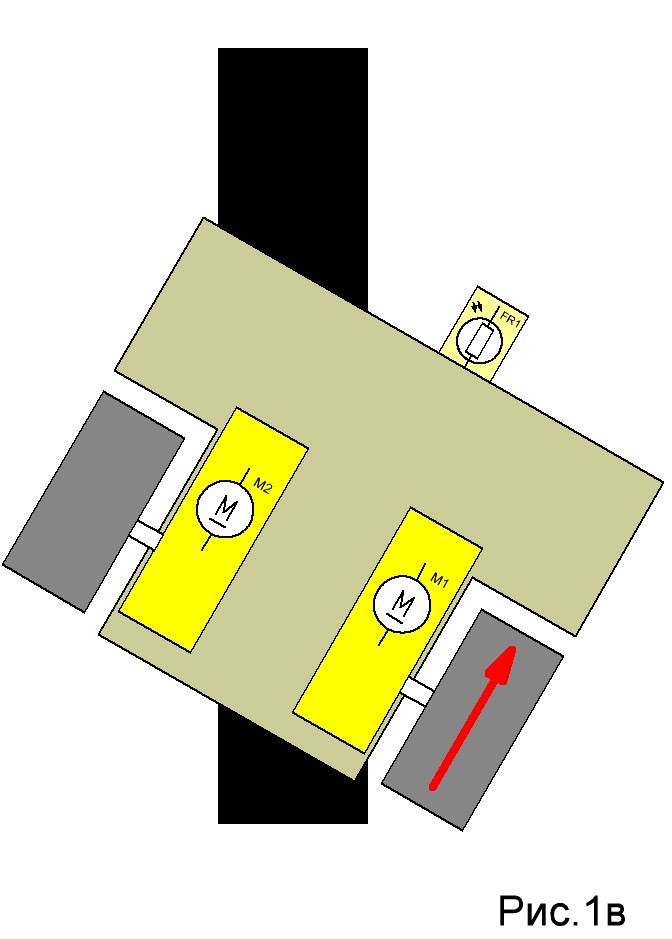
а если датчик окажется над белым полем (рис.1в), то робот будет стараться вернуться назад, на линию (рис.1г). Таким образом, робот будет двигаться зигзагами вдоль черной линии.
Принципиальная схема робота.
В качестве датчика используется такой же фоторезистор, как и в схеме для
робота "Мотылька". Фоторезистор
направлен вниз, на поле, и его сопротивление будет меняться в зависимости от
того находится он над черной линией или над белым полем. От белого поля света
отражается больше, поэтому фоторезистор будет лучше освещен и его сопротивление
будет мало, а когда он находится над черной линией, он будет освещен хуже,
и его сопротивление будет больше, так как от черной линии света отражается
меньше. Но естественного освещения в данном случае будет недостаточно, поэтому
нам потребуется дополнительный источник света, в качестве которого будем
использовать светодиод:
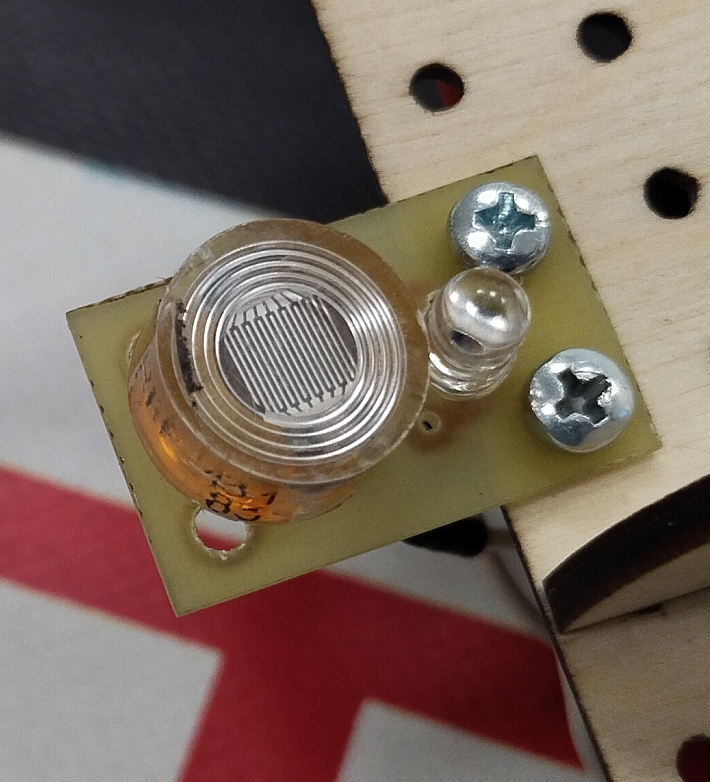
Схема управления правым двигателем (М1) ничем не отличается от схемы управления
правым двигателем робота "Мотылька"
(для простоты будем использовать схему на составных транзисторах КТ973).
Когда отраженный поток света будет ярким, робот на белом поле, транзистор VT1
откроется и включит мотор М1, а когда датчик света окажется над черной линией,
поток отраженного от нее света будет недостаточным, сопротивление фоторезистора
увеличится и транзистор VT1 закроется, выключив мотор М1.
Теперь нужно сделать так, чтобы когда мотор М1 работает, мотор М2 должен быть
выключен и наоборот, когда мотор М1 выключен, мотор М2 должен работать.
Сделать это можно следующим образом:
Когда мотор М1 работает - транзистор VT1 открыт, сопротивление его перехода
коллектор-эмиттер мало, также мало падение напряжения на этом переходе, и его
недостаточно для того, чтобы открыть транзистор VT2, поэтому мотор М2 выключен.
Как только транзистор VT1 закроется, а это произойдет тогда, когда датчик
робота окажется над черной линией, тока проходящий через мотор М1 и резистор
R3 будет достаточно для того чтобы открыть транзистор VT2 и включить мотор М1,
при этом ток проходящий через мотор М1 будет очень мал, поэтому мотор М1
работать не будет.
И небольшое видео работы:
Примечание.
- Изменения, которые необходимо внести с схему
робота "Мотылька", чтобы получить робота,
двигающегося вдоль линии:
- Возможна ситуация, которая зависит и от применяемых моторов, и от состояния
поля, когда робот съезжает с линии, проезжает её "по инерции" и потом не
может на нее вернуться. В этом случае следует уменьшить напряжение питания,
например использовать только один элемент 18650, тем самым уменьшив скорость
перемещения робота.
- Можно ли еще упростить схему? Можно. Например, можно исключить из схемы
резистор R2, а чувствительность регулировать изменяя положение светодиода:
Copyright © R9AL 2022 Все права защищены