
Датчики касания
В робототехнике применяются различные датчики. Главная задача датчиков -
представлять "электронному мозгу" информацию из внешней среды, а задача
программиста - научиться получать и обрабатывать эту информацию.
Самый простой датчик - датчик касания. В самом общем случае это просто кнопка
(работу с кнопкой мы уже рассматривали здесь:
Кнопки и выключатели, работаем с цифровыми входами..
На самом деле, под датчиком касания понимается два типа датчиков. Первый тип -
это механический датчик, принцип работы которого заключается в замыкании
(размыкании, переключении) механических контактов, как у обычной кнопки или
переключателя. Второй тип датчиков - это датчики на основе сенсорных кнопок,
срабатывание которых происходит от прикосновения к специальному сенсору пальцем
или специальным стилусом.
Типы датчиков
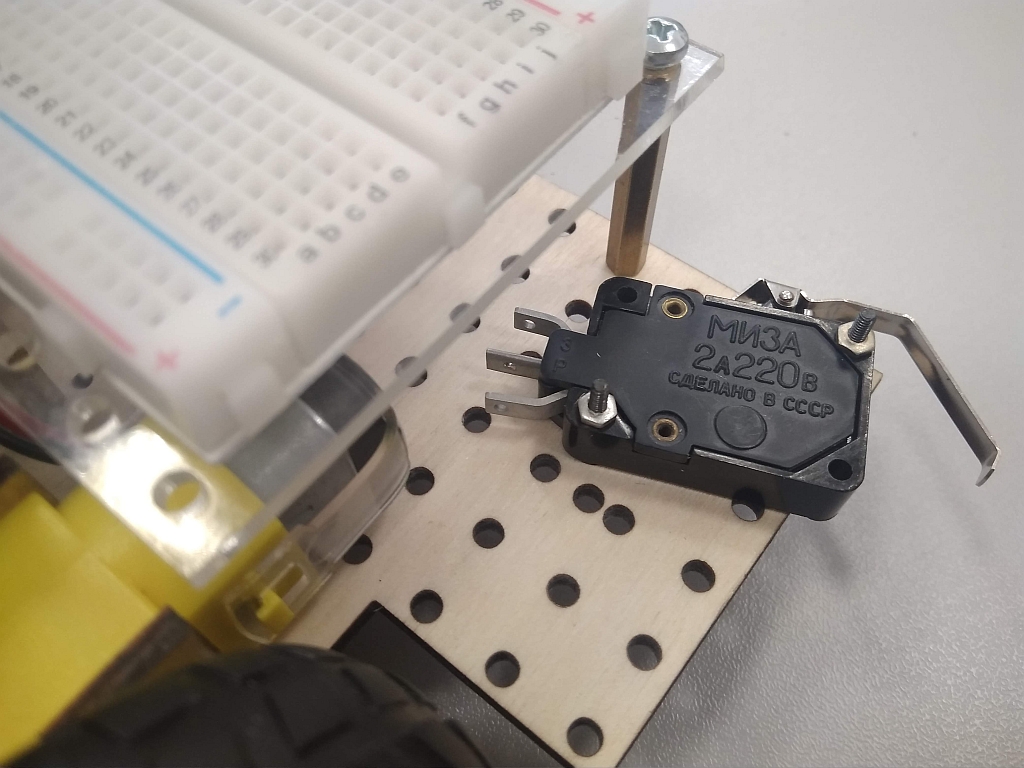
Мы будем использовать в качестве датчиков касания микропереключатели
типа KMSW-12 и МИ3А.


Микропереключатель подключается к контроллеру аналогично подключению кнопки. Первый способ - подтягивание вывода к общему проводу (в свободном состоянии на выводе логический ноль, при срабатывании - логическая единица):
Второй способ - подтягивание вывода к плюсу питания (в свободном состоянии на выводе логическая единица, при срабатывании - логический ноль):
Возможен и такой вариант подключения:
Конденсатор в данном случае служит для подавления "дребезга контактов", о котором не следует забывать. Конечно, проблему дребезга контактов можно решить и программно, но иногда проще использовать конденсатор.
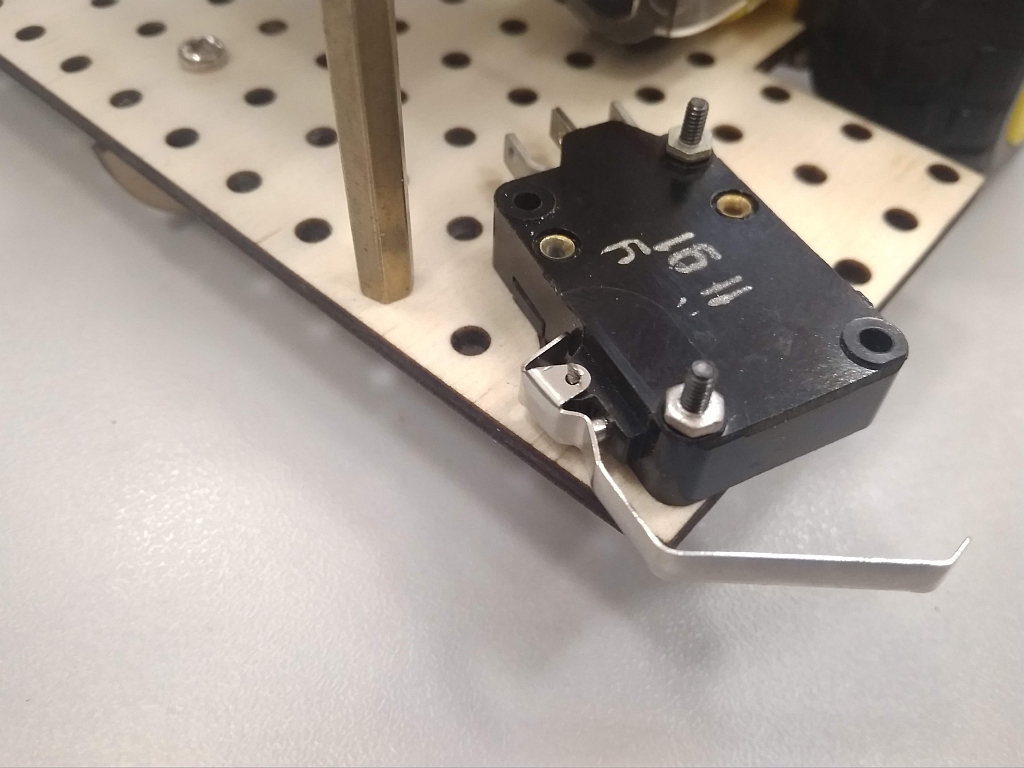
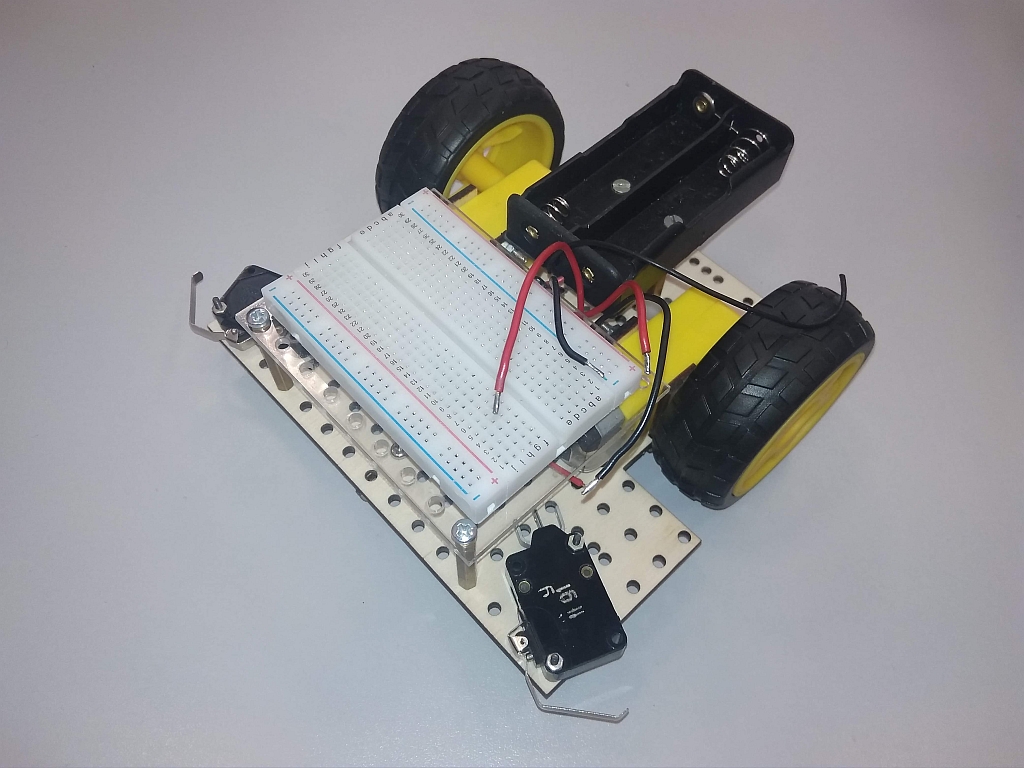
Крепление датчиков
Примеры крепления датчиков: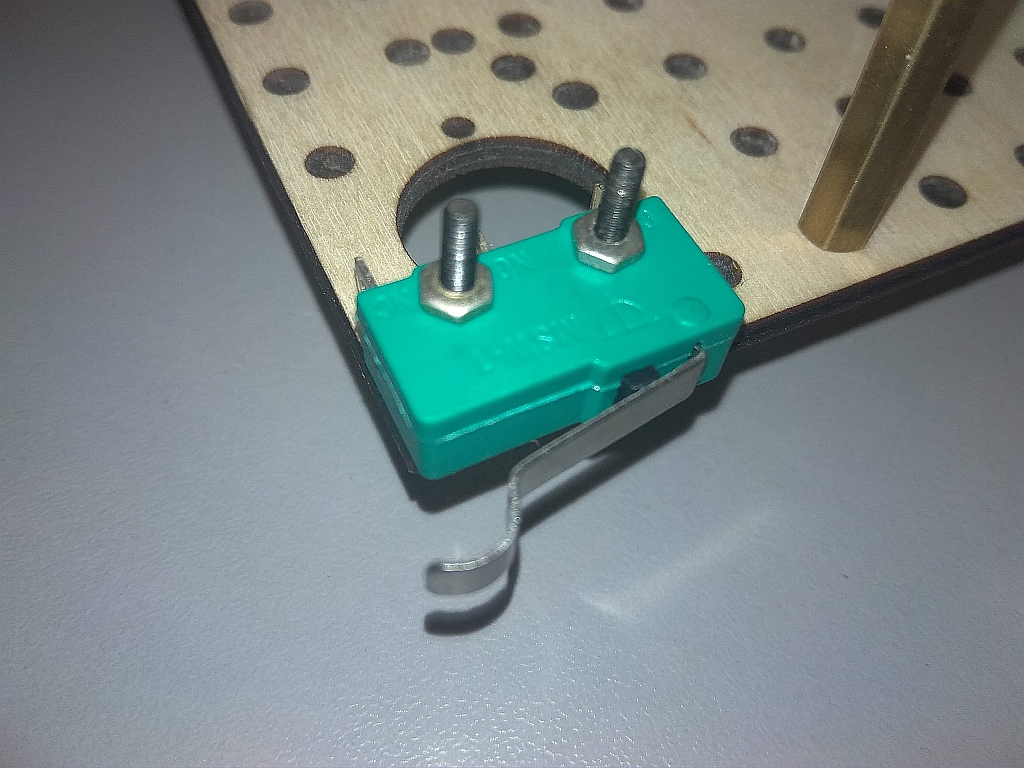
Copyright © R9AL 2022 Все права защищены
