
Робот для соревнований "Сумо" создан на базе робота "Управляемый титан", производства
Принципиальная схема робота:
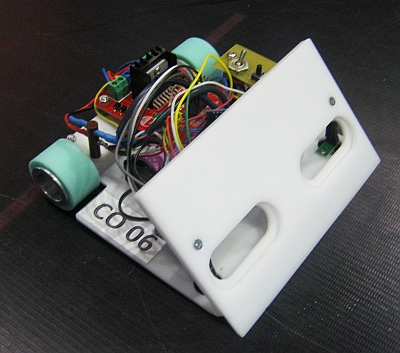
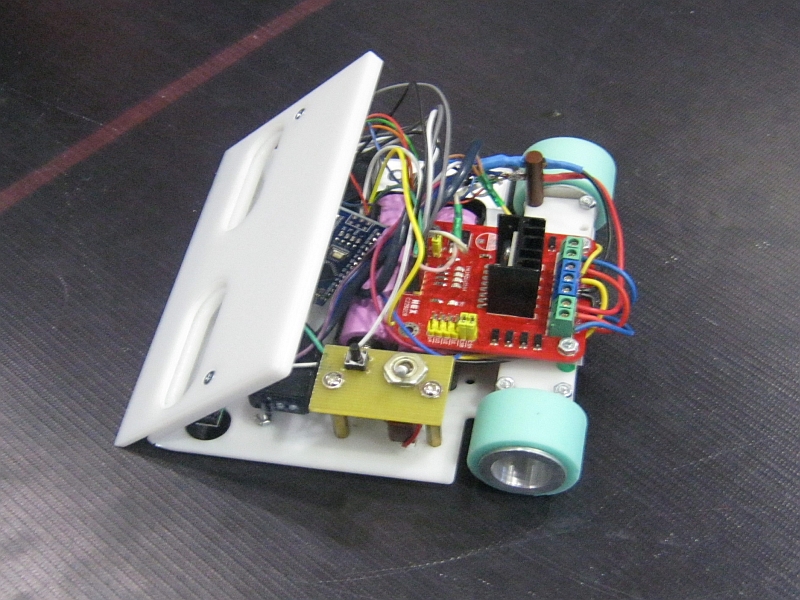
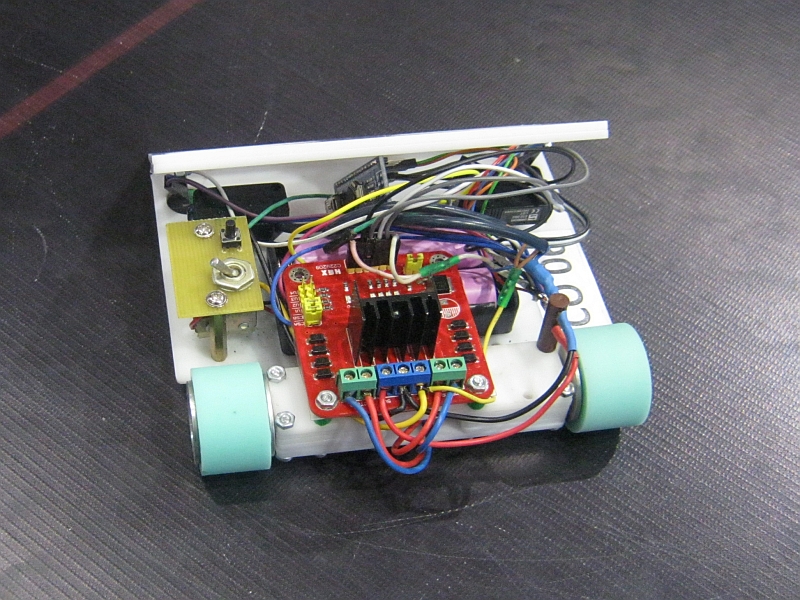
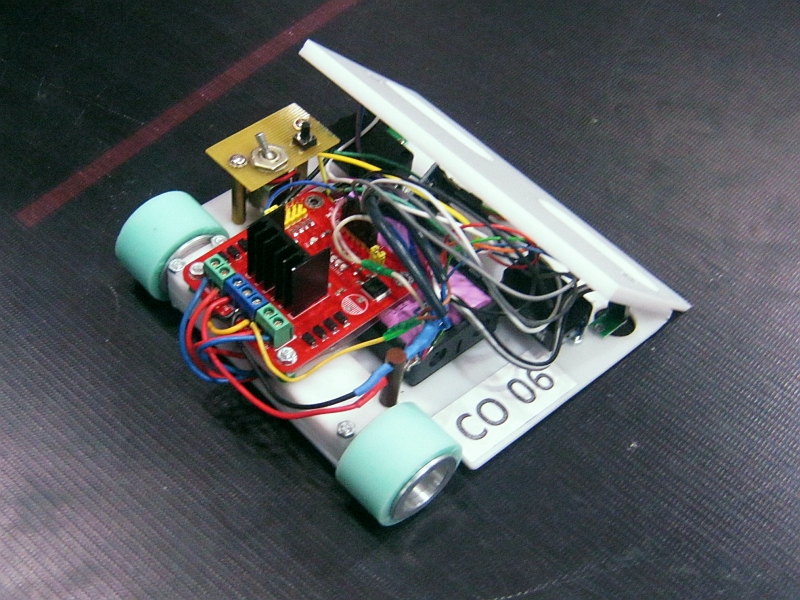
Для управления двигателями применяется драйвер на L298, так как поставляемый фирмой производителем шилд "Sphere74 Nano shield v.1.2" отказался нормально работать, а производитель отказался решать эту проблему. В данном случае оказалось проще найти нормально работающий драйвер, чем объяснить производителю, что они продают некачественный товар. В качестве датчиков расстояния использованы датчики E3Z-D62 фирмы Omron. Несмотря на то, что эти датчики довольно хорошо работают, применение их в данном роботе не самое лучшее решение. Дело в том, что для питания робота используется два аккумулятора типа 18650, а это 7,4 вольта (или около 8В, при макимальной зарядке), а для нормальной работы датчика нужно напряжение от 12 до 24В.
В целом из всего этого удалось сделать нормального робота, занявшего 2-е место (с незначительным отставанием по коэффициенту Бухгольца от 1 места) на городском конкурсе SUMO. Видео можно посмотреть в альбоме.
Обсуждение: http://msevm.com/forum/index.php?topic=7747.0
Продолжение
Copyright © R9AL 2018 Все права защищены
