 В продолжение темы:
http://r9al.ru/2020/sumo/index.htm
В продолжение темы:
http://r9al.ru/2020/sumo/index.htm
Это новая версия миниробота для соревнований "Сумо", размерами 10х10 см.
Предыдущий робот (см.
http://r9al.ru/2020/sumo/index.htm)
был собран на основании, распечатанном на 3D принтере, показал хорошие
результаты, но пластиковое основание оказалось недостаточно прочным,
незначительные перегревы моторов приводили к деформации крепления, ну и в целом,
конструкция, отработав в нескольких соревнованиях, требовала модернизации.
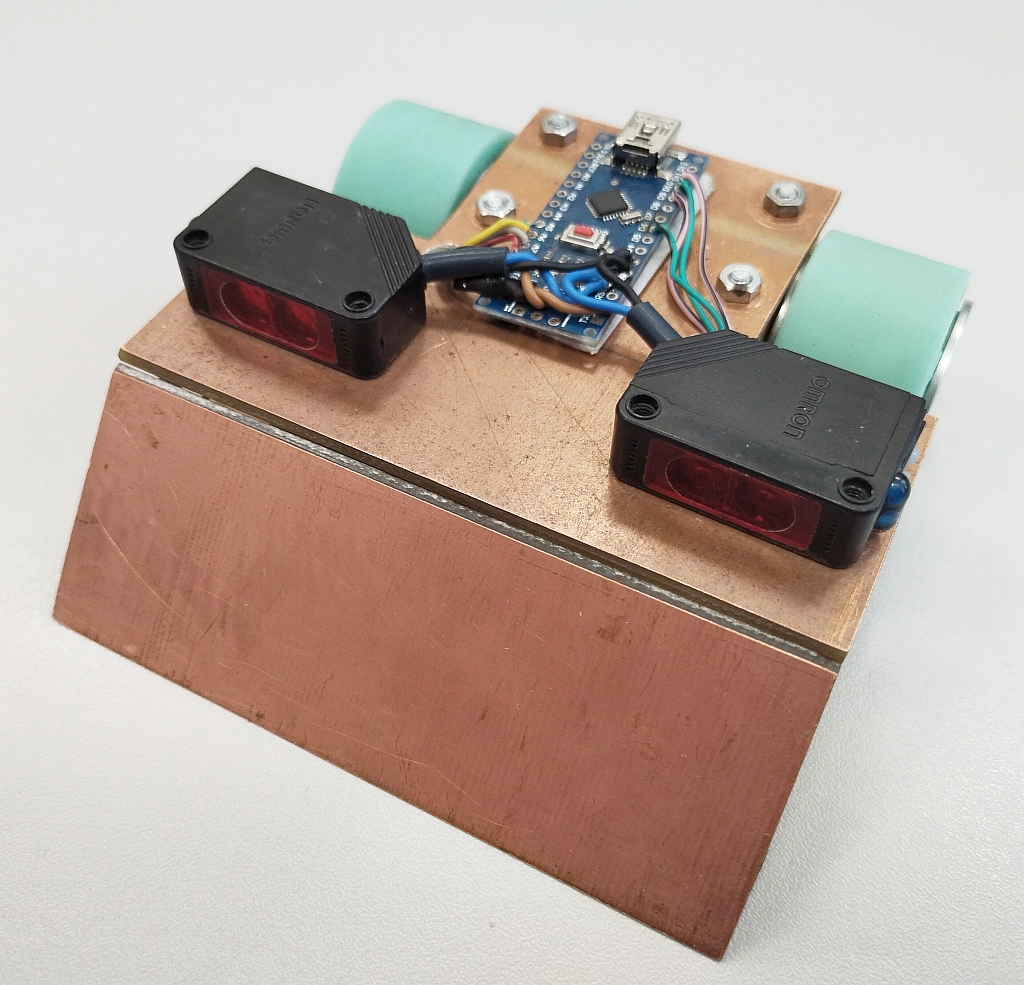
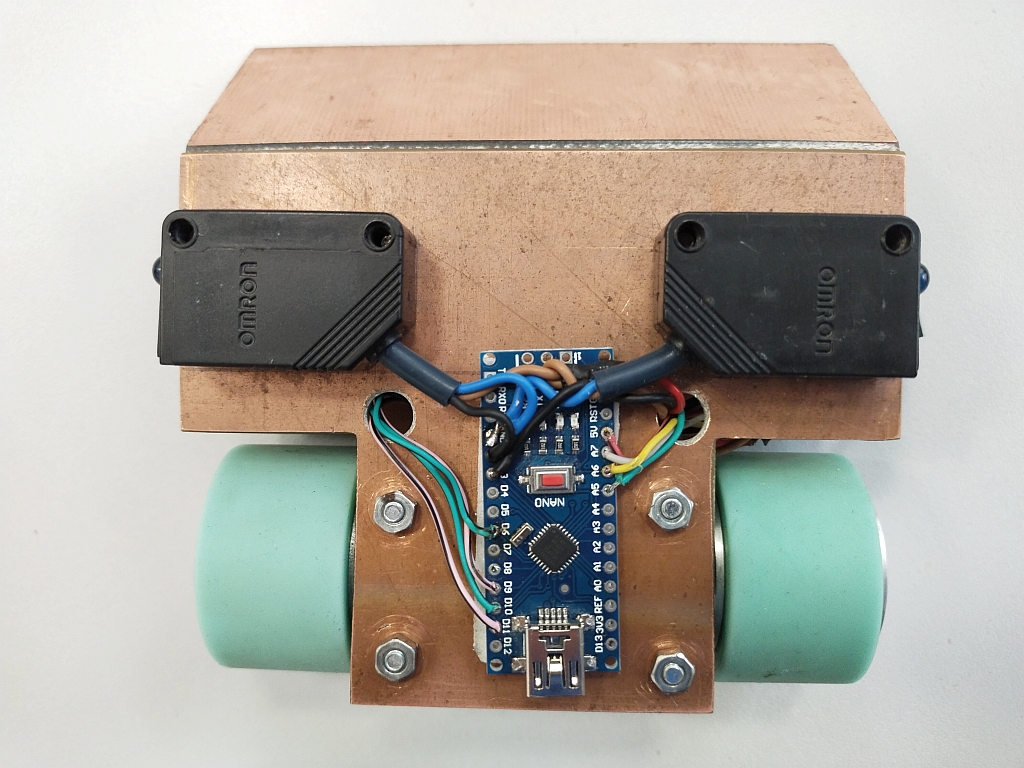
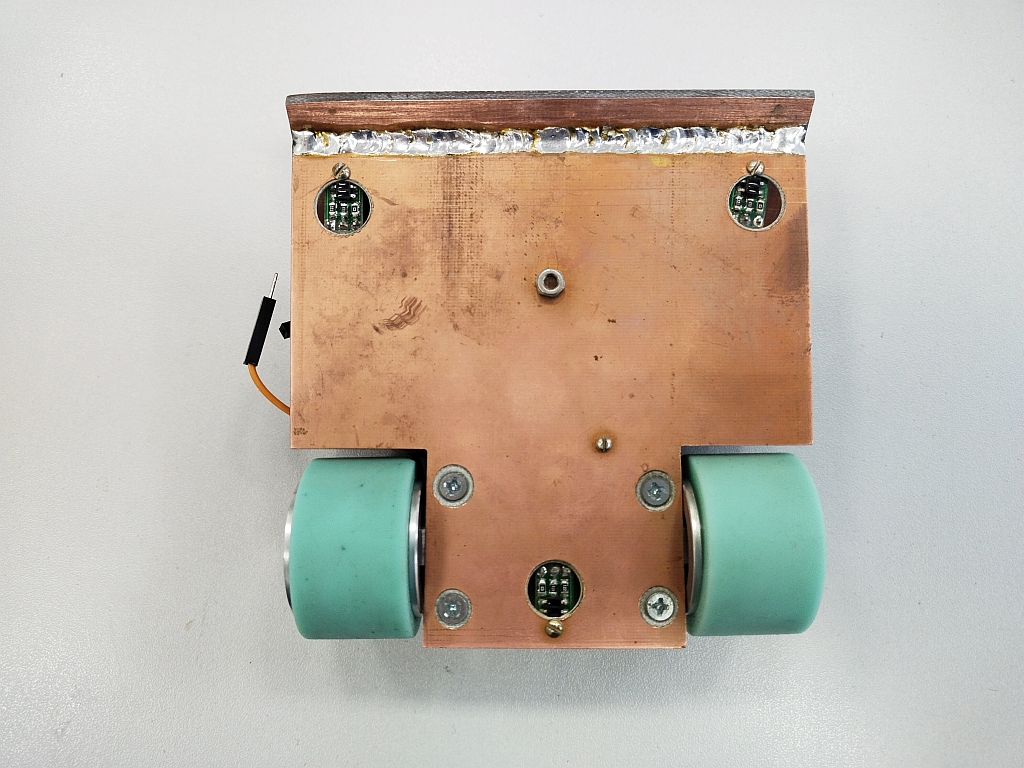
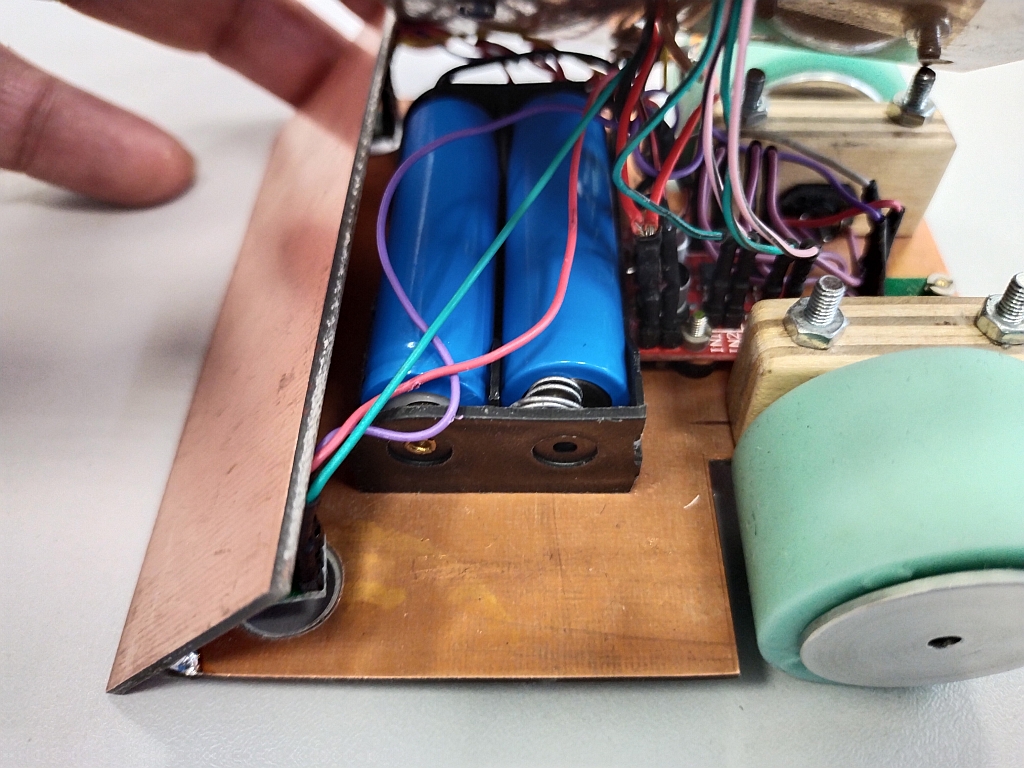
Корпус нового робота собран из двухстороннего фольгированного стеклотекстолита.
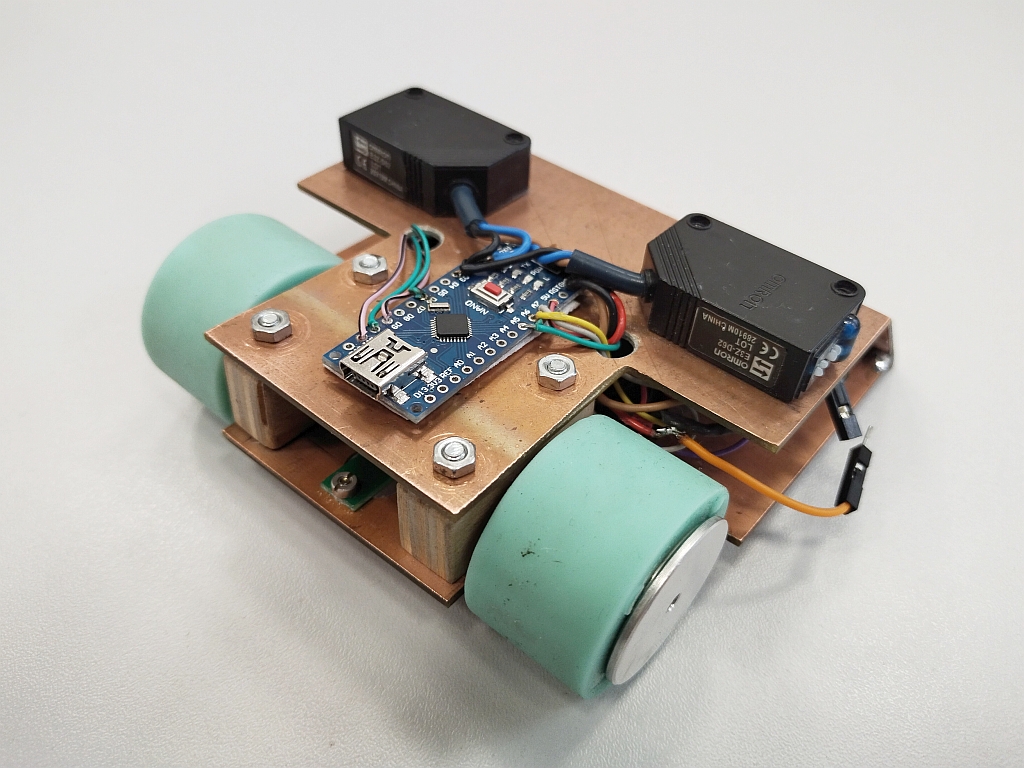
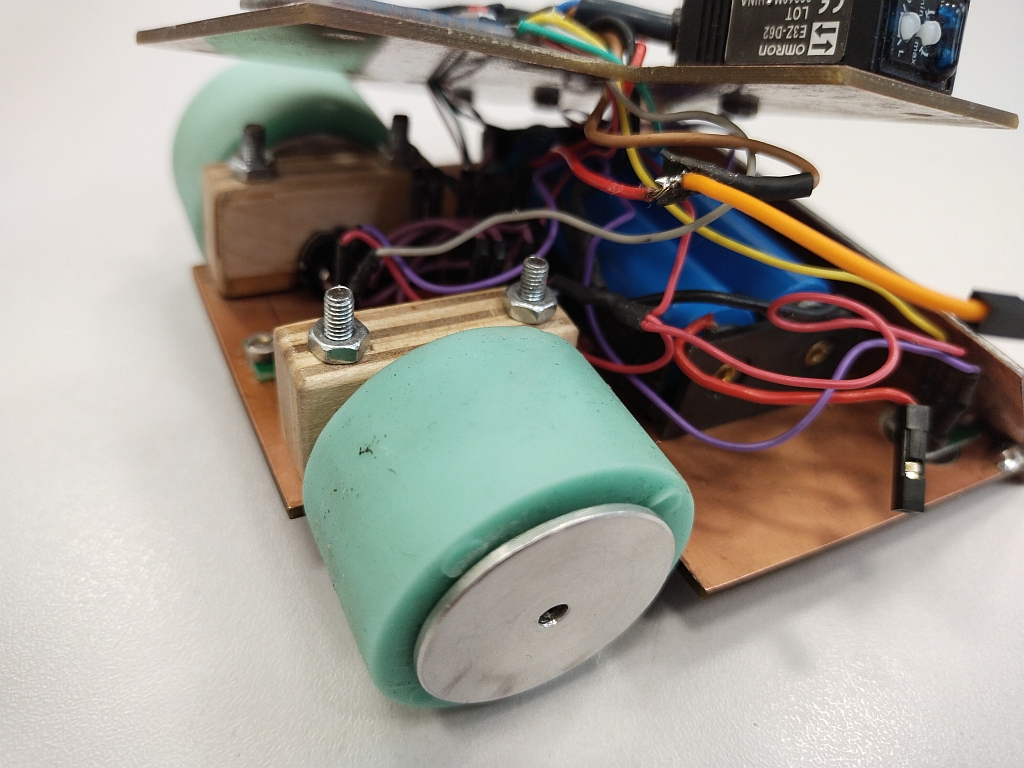
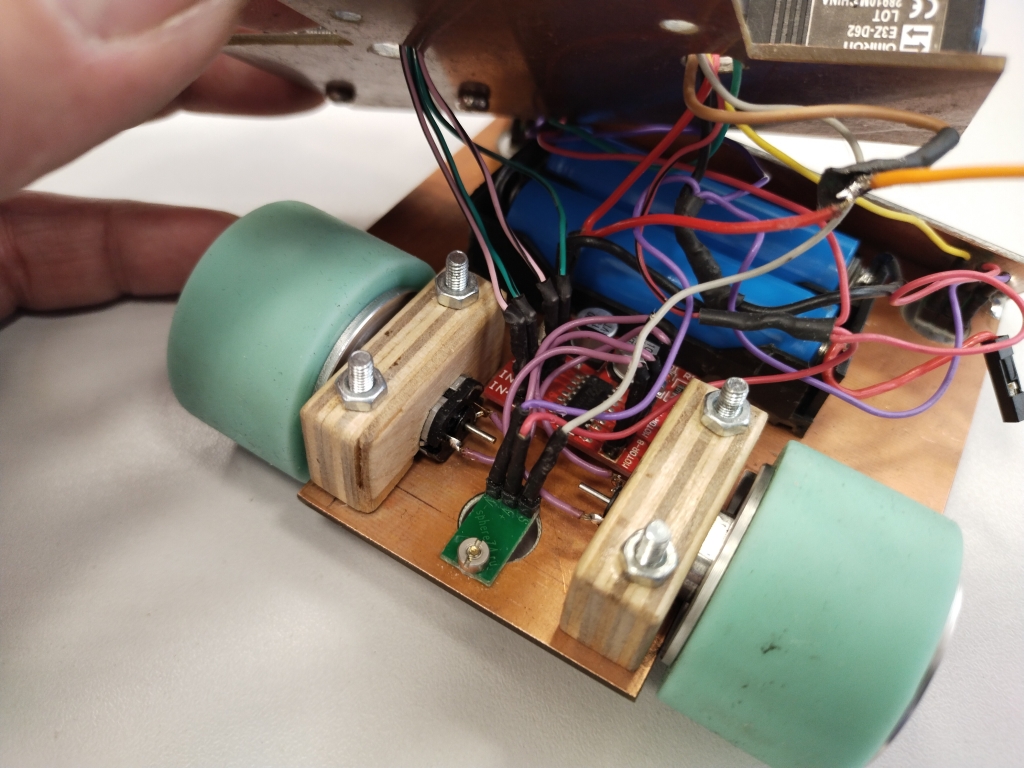
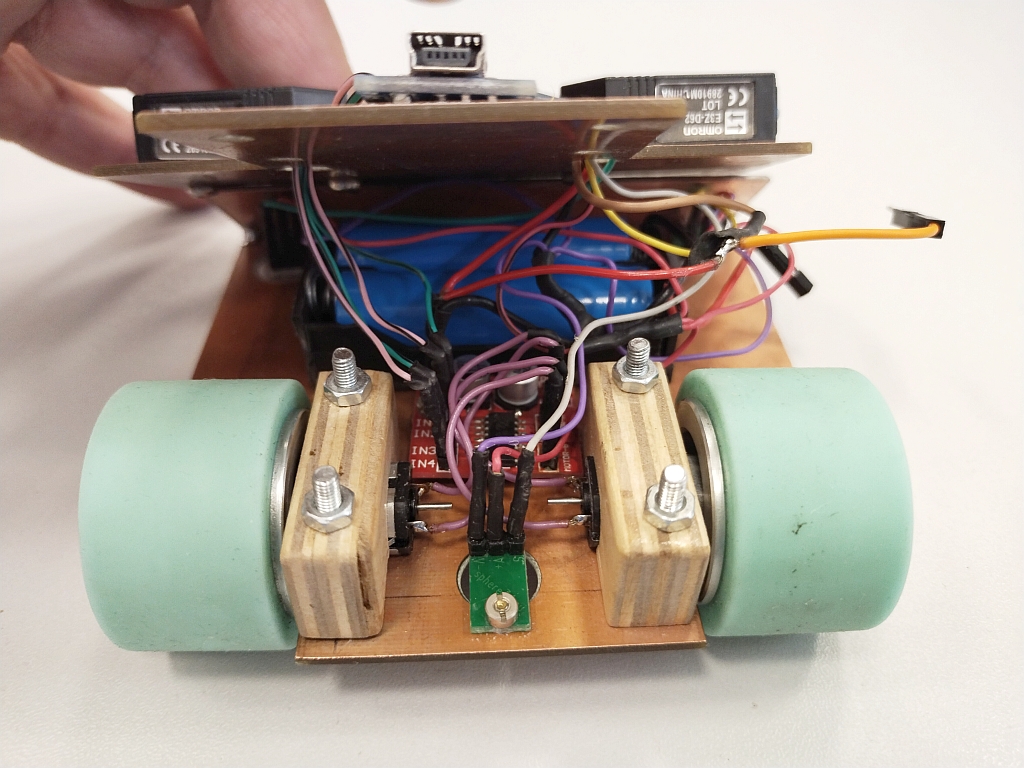
Для крепления двигателей, из фанеры были изготовлены специальные держатели:

Принципиальная схема робота:
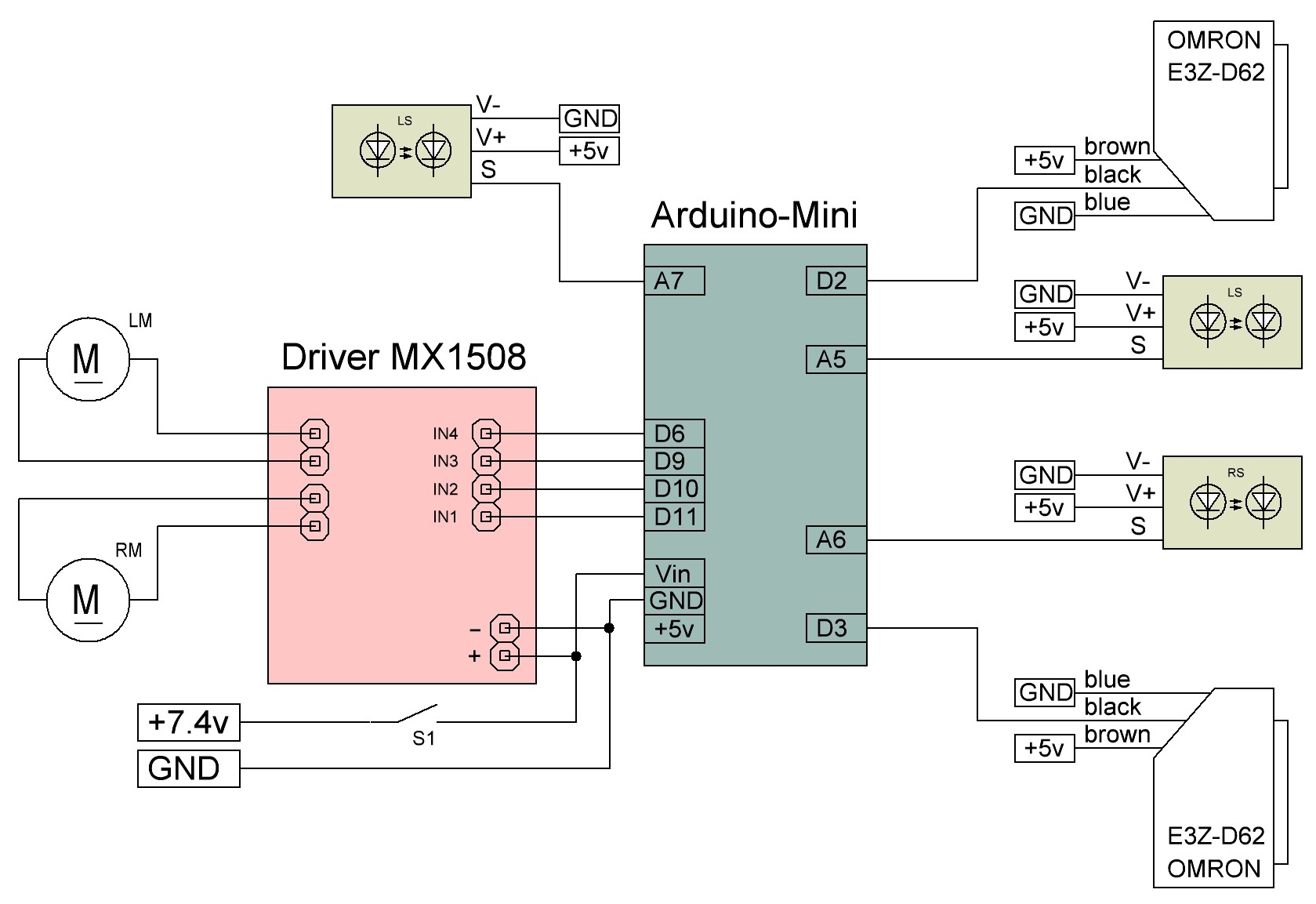
Для управления двигателями применяется драйвер на микросхеме MX1508, В качестве датчиков расстояния использован датчик E3Z-D62 фирмы Omron, и в отличии от предыдущего варианта здесь применено два датчика расстояния. Питание робота осуществляется от двух литий-ионных аккумуляторов 14500 3.7V 1200mAh, размерами 14x50мм (формат АА).
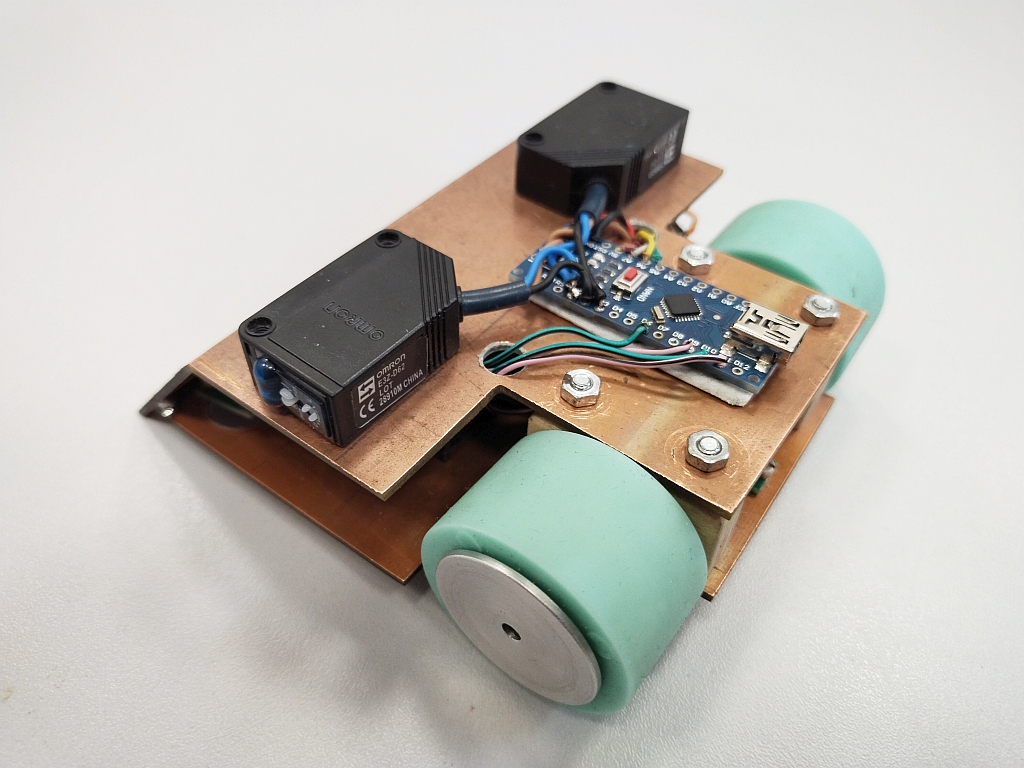
Конструкция робота:
Первое боевое крещение робот получил на открытых городских соревнованиях роботов "СУМО", проходивших в г.Челябинске 22 мая 2022 года.
Обсуждение: http://msevm.com/forum/index.php?topic=7747.0