
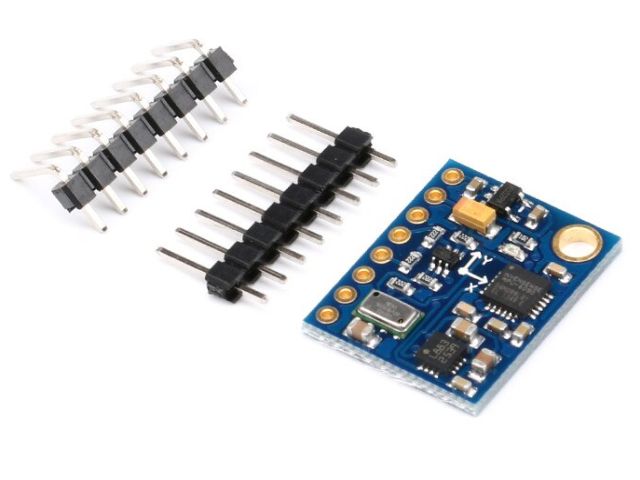
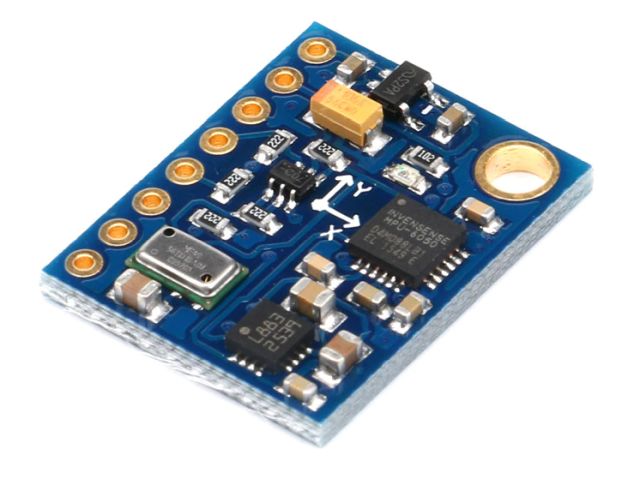
Модуль GY-86 включает в себя:
- 3-осевой гироскоп + 3-осевой акселерометр на базе микросхемы MPU6050;
- 3-осевой цифровой магнитометр (компас) на базе микросхемы HMC5883L;
- Высокоточный цифровой барометр/термометр MS5611.
- Напряжение питания 3-5 В.
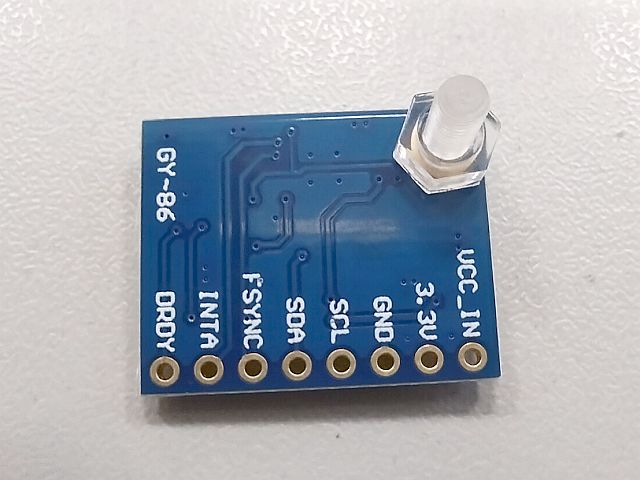
- Протокол связи: I2C.
- Размер: 2.2х1.7. см.
Файлы:
Тестовые программы:
MPU6050
#include "MPU6050.h"
MPU6050 mpu;
int16_t ax, ay, az;
int16_t gx, gy, gz;
int16_t temp;
void setup() {
Wire.begin();
Serial.begin(9600);
mpu.initialize();
// состояние соединения
Serial.println(mpu.testConnection() ? "MPU6050 OK" : "MPU6050 FAIL");
delay(1000);
}
void loop() {
mpu.getMotion6(&ax, &ay, &az, &gx, &gy, &gz);
Serial.print((float)ax/ 32768 * 2); Serial.print('\t');
Serial.print((float)ay/ 32768 * 2); Serial.print('\t');
Serial.print((float)az/ 32768 * 2); Serial.print('\t');
Serial.print((float)gx/ 32768 * 250); Serial.print('\t');
Serial.print((float)gy/ 32768 * 250); Serial.print('\t');
Serial.println((float)gz/ 32768 * 250);
delay(5);
}
HMC5883
#include < Wire.h> // подключаем I2C библиотеку
#define addr 0x1E // I2C 7-битный адрес датчика HMC5883
void setup() {
Serial.begin(9600); // инициализация последовательного порта
Wire.begin(); // инициализация I2C
// Задаём режим работы датчика HMC5883:
Wire.beginTransmission(addr);
Wire.write(0x00); // выбираем регистр управления CRA (00)
Wire.write(0x70); // записываем в него 0x70 [усреднение по 8 точкам, 15 Гц, нормальные измерения]
Wire.write(0xA0); // записываем в регистр CRB (01) 0xA0 [чувствительность = 5]
Wire.write(0x00); // записываем в регистр Mode (02) 0x00 [бесконечный режим измерения]
Wire.endTransmission();
}
void loop() {
Wire.beginTransmission(addr);
Wire.write(0x03); // переходим к регистру 0x03
Wire.endTransmission();
Wire.requestFrom(addr, 6); // запрашиваем 6 байтов
while( Wire.available() )
{
int h = Wire.read(); // старший байт значения по оси X
int l = Wire.read(); // младший байт значения по оси X
int x = word(h, l); // объединяем в двухбайтовое число
int y = Wire.read(); // старший байт значения по оси Y
y = y << 8; // сдвигаем влево на 8 битов
y = y | Wire.read(); // объединяем с младшим байтом по OR
int z = Wire.read() << 8; // читаем байт и сдвигаем влево на 8 битов
z |= Wire.read(); // сокращённый синтаксис операции OR
Serial.print("X = ");
Serial.println(x, DEC);
Serial.print("Y = ");
Serial.println(y, DEC);
Serial.print("Z = ");
Serial.println(z, DEC);
Serial.println();
}
delay(100);
}
MS5611
#include < Wire.h> // библиотека встроенная, скачивать отдельно ее не нужно
#include < MS5611.h>
MS5611 ms5611;
double referencePressure;
void setup()
{
Serial.begin(9600);
// Initialize MS5611 sensor
Serial.println("Initialize MS5611 Sensor");
ms5611.begin();
// Get reference pressure for relative altitude
referencePressure = ms5611.readPressure();
}
void loop()
{
// Read raw values
uint32_t rawTemp = ms5611.readRawTemperature();
uint32_t rawPressure = ms5611.readRawPressure();
// Read true temperature & Pressure
double realTemperature = ms5611.readTemperature();
long realPressure = ms5611.readPressure();
// Calculate altitude
float absoluteAltitude = ms5611.getAltitude(realPressure);
float relativeAltitude = ms5611.getAltitude(realPressure, referencePressure);
Serial.println("--");
Serial.print(" rawTemp = ");
Serial.print(rawTemp);
Serial.print(", realTemp = ");
Serial.print(realTemperature);
Serial.println(" *C");
Serial.print(" rawPressure = ");
Serial.print(rawPressure);
Serial.print(", realPressure = ");
Serial.print(realPressure);
Serial.println(" Pa");
Serial.print(" absoluteAltitude = ");
Serial.print(absoluteAltitude);
Serial.print(" m, relativeAltitude = ");
Serial.print(relativeAltitude);
Serial.println(" m");
delay(1000);
}
Copyright © R9AL 2022 Все права защищены