
Проект Черникова Владимира
Гексопод - это механическое транспортное средство, которое ходит
на шести ногах. Робот имеет гораздо большую проходимость по сравнению с
остальными мобильными роботами. Он может быть статически устойчив на трех или
более ногах, робот обладает большой гибкостью в том, как он может двигаться.
В первую очередь гексапод разрабатывался для исследования окружающей и
одновременно труднодоступной территории или в целях спасательных операций.
Если ноги станут инвалидными, робот все еще может ходить. Кроме того, не все
ноги робота необходимы для стабильности; другие ноги могут свободно доставать
новые места для ног или управлять полезной нагрузкой.
Конструкции гексаподов различаются расположением ножек. Роботы, вдохновленные
насекомыми, обычно имеют боковую симметрию. Как правило, отдельные ноги имеют
от двух до шести степеней свободы. Тем самым обеспечивая очень хорошую
подвижность. В настоящее время практически во всех промышленно развитых странах
интенсивно ведутся работы по созданию и исследованию шагающих роботов. Это
вызвано тем, что шагающие машины по сравнению с традиционными колёсными и
гусеничными машинами имеют ряд преимуществ перед традиционными транспортными
средствами при движении по поверхности со сложным рельефом, такими как
пресечённая местность, завалы, а также внутри зданий и сооружений, где
необходимо перемещаться по лестницам и узким коридорам и шахтам.
Таким образом, шагающие роботы в будущем станут неотъемлемой частью не только
промышленности, но и также повседневной жизни обычного человека.
Процесс создания гексапода
Корпус
Самая главная часть робота - это корпус. Так как от него зависит размер робота, функционал, внешний вид. Весь этап работы над созданием корпуса можно разделить на следующие фазы:
- Поиск или создание 3D модели корпуса. 3D модель робота была найдена мной в Интернете. На сайте Thingverse, на котором имеется большая база данных по 3D моделированию. Основной причиной того что была взята готовая модель робота, недостаточное количество времени на проект.
- Создание и выбор материала для корпуса. Самый простой и удобный выбор для
меня оказалось 3D печать (фото 1), так как печатается модель качественно, в
зависимость от выбора пластика будет зависеть и характеристики корпуса. Готовый
корпус представлен на фото 2.
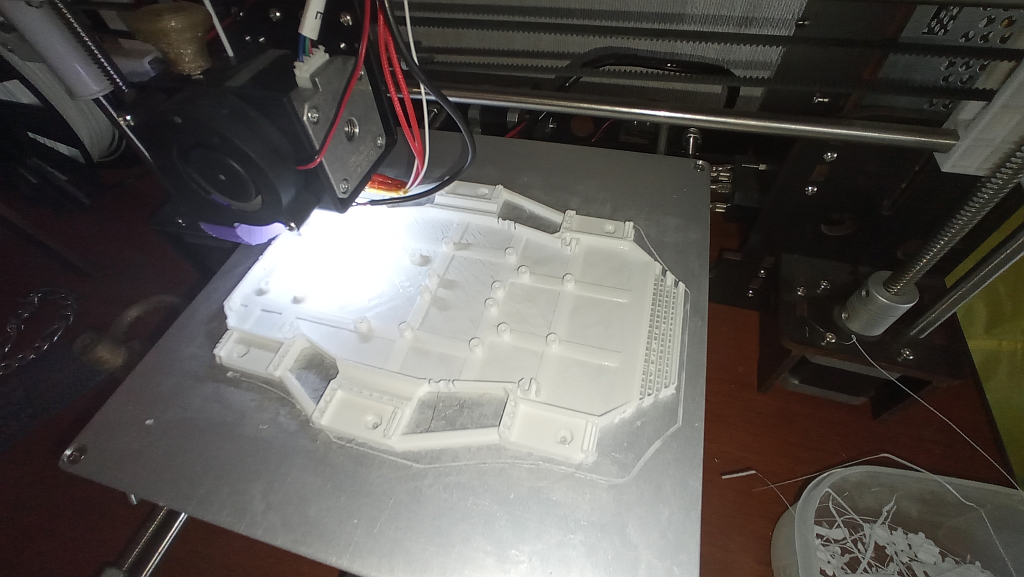
Фото 1. Печать главного корпуса
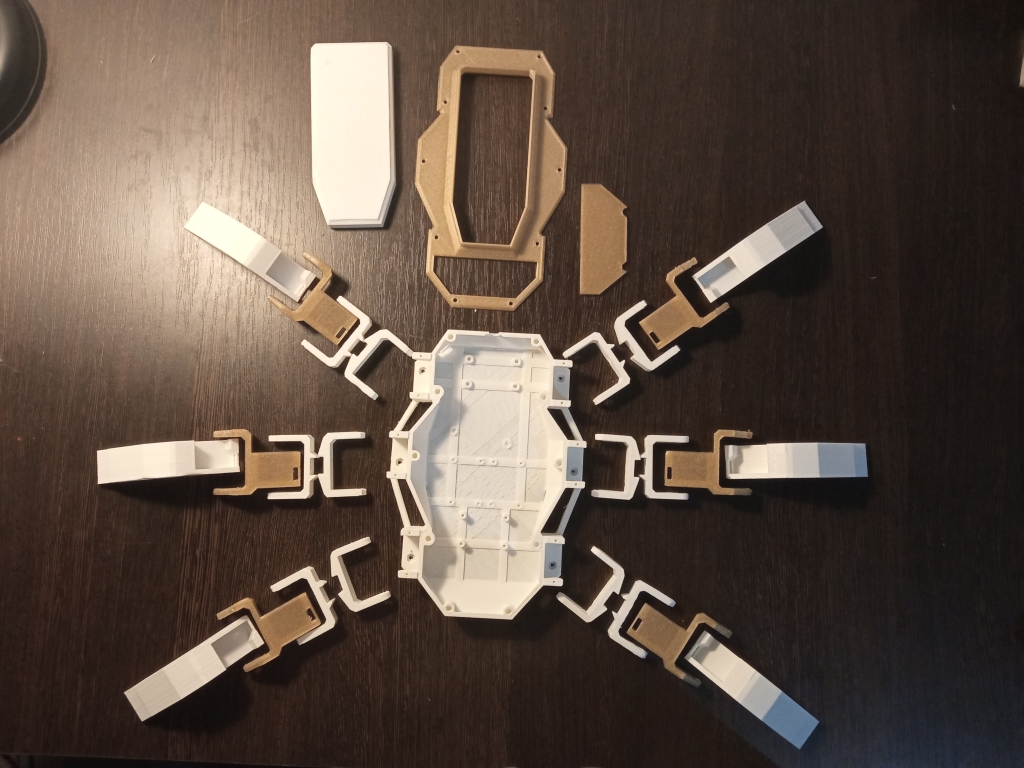
Фото 2. Готовый корпус
"Мышцы робота"
Так называемыми мышцами являются 20 сервоприводов, которые и будут двигать лапы робота. Самые оптимальные сервоприводы это MG90 (фото 3).

Фото 3. Сервопривод
Контроллер
Мозгом робота является микроконтроллер. Есть много видов микроконтроллеров, но самые главные из которых у меня был выбор это: Ардуино и STM32.
Ардуино очень лёгкий в осваивании и очень гибкий, но у него мало вычислительной мощности и контактов для управления большим количеством сервоприводов и остальной периферийной электроникой. STM32 обладает более сильной вычислительной мощностью. Небольшим недостатком является сложность в программировании.
Из выше сказанного был выбран STM32 из-за своей вычислительной мощности.
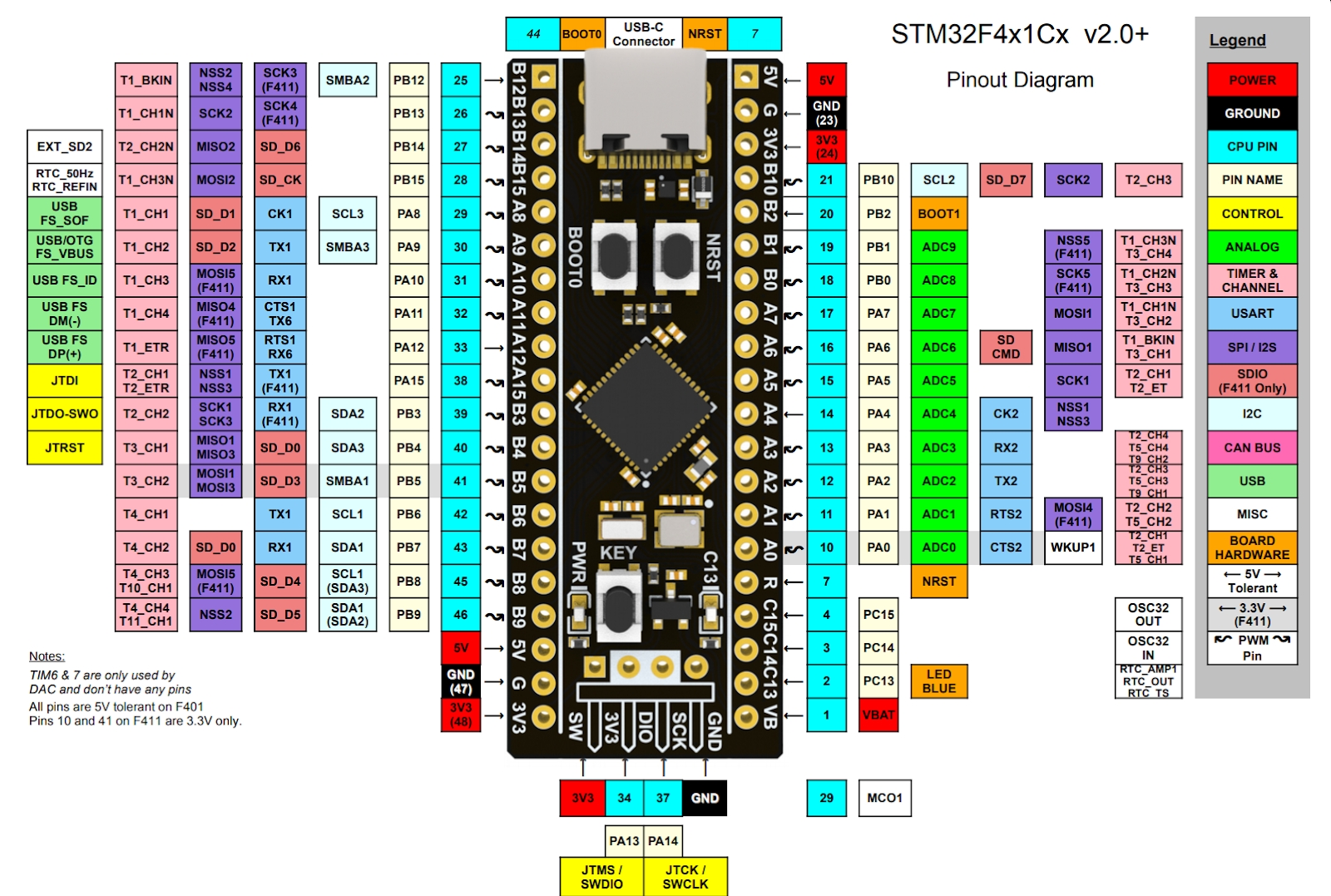
STM32F4
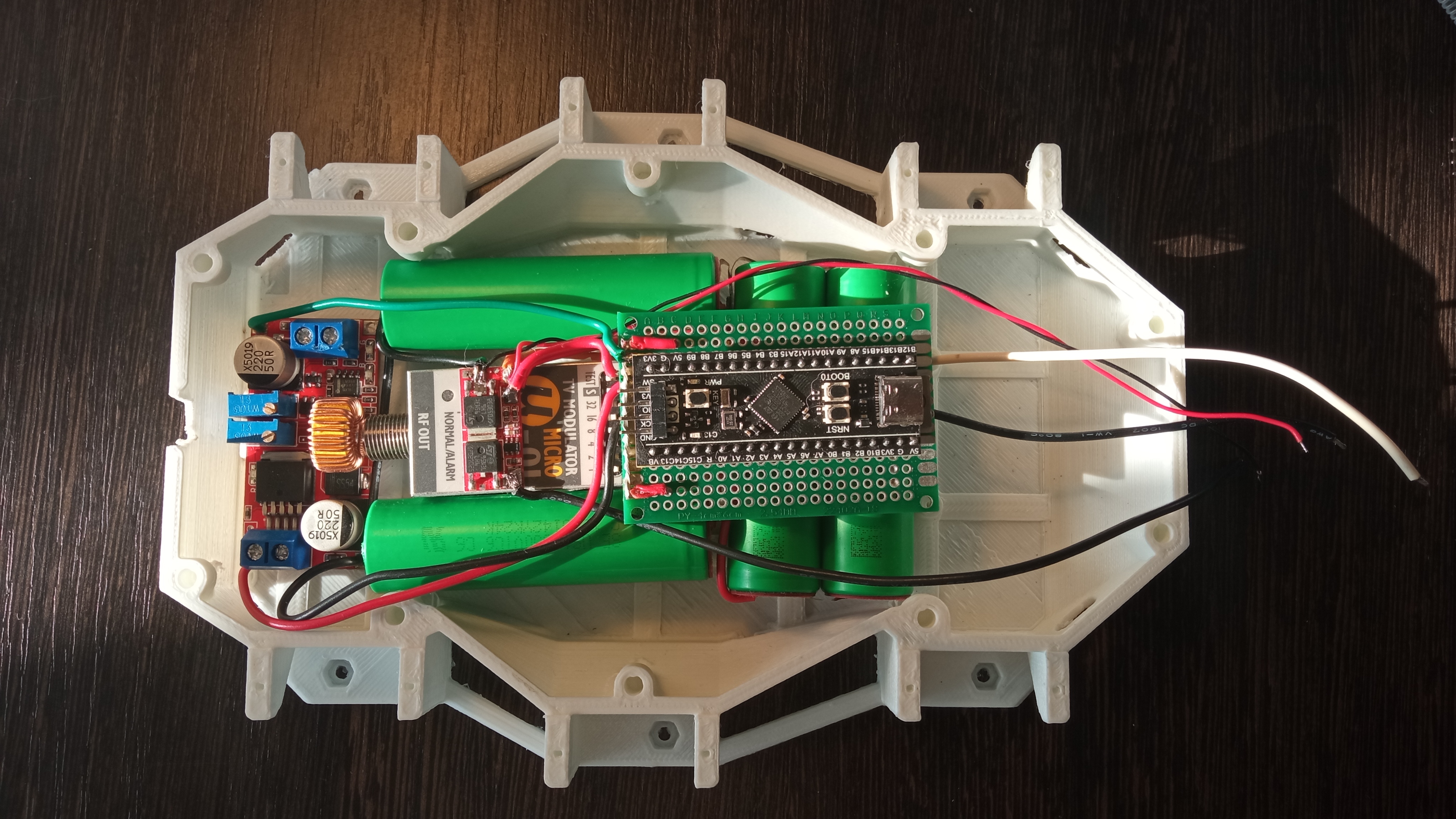
Питание
Питание выполнено с помощью четырёх аккумуляторов 4.2 вольта 2 Ам/час соединенных попарно, и эти пары соединены последовательно, вследствие чего у нас получается 8.4 вольта 4 Ам/час.
Через понижающий преобразователь подключены сервоприводы, так как им необходимо 6 вольт. Повышающий преобразователь для питания камеры. Микроконтроллер питается от собственного понижающего преобразователя на 5 вольт.
Управление
На данный момент управление выполнено в виде беспроводного контролера от PS2 (фoто 3) и осуществляется при помощи оператора. Данный джойстик имеет большое количество кнопок, которые предоставляют большой спектр функций исполняемых роботом.

Фото 3. Беспроводной контроллер
На борту робота будет стоять FPV камера с подвижным механизмом для наблюдения окружения вне зоны видимости глаз.
Для поворота камеры используется два сервопривода, а для передачи изображения по своболному телевизионному каналу - модулятор компании PLANAR (фото 4).

Фото 4. Модулятор Микро М-01 PLANAR
Сигнал с выхода модулятора поступает в антенну.
Сборка и тестирование робота
Вся электроника представлена в виде принципиальной схемы.
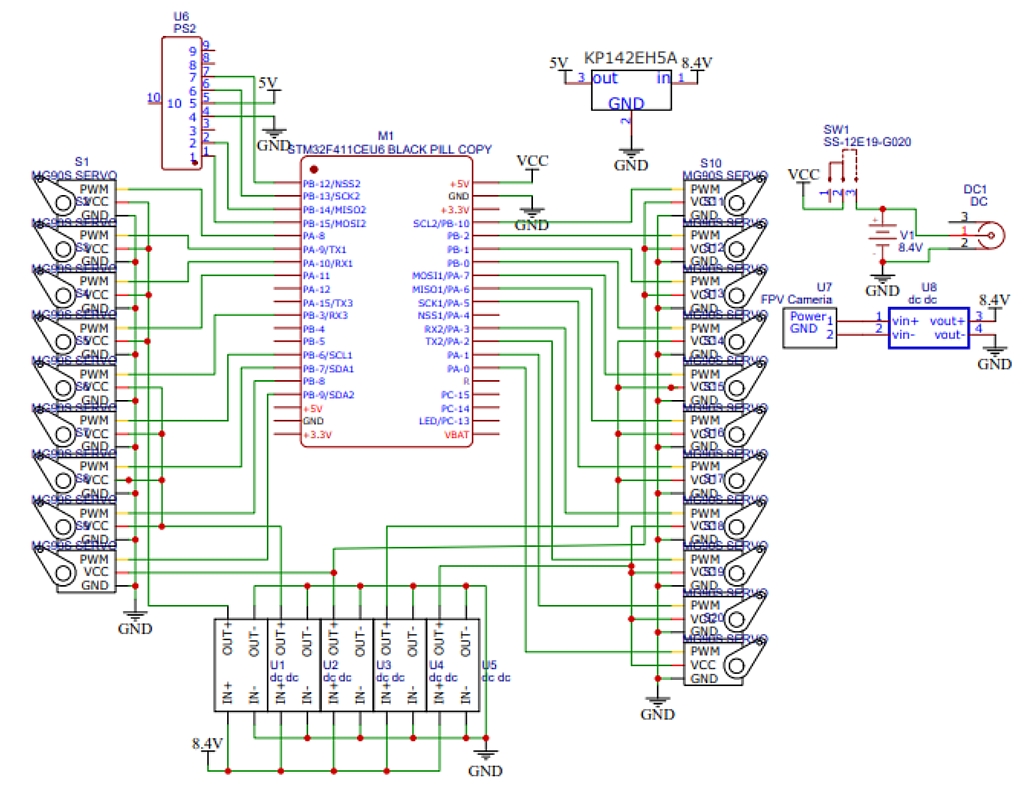
Принципиальная схема робота.
Собираем лапы и устанавливаем их на место.
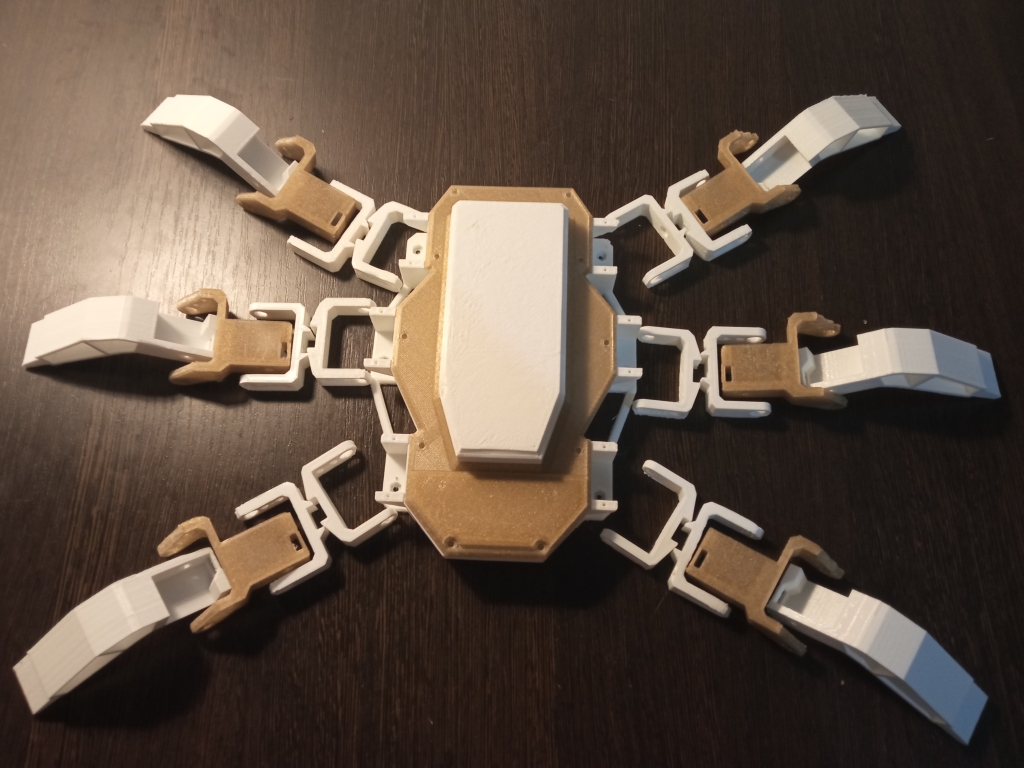
Фото 5. Сборка робота.
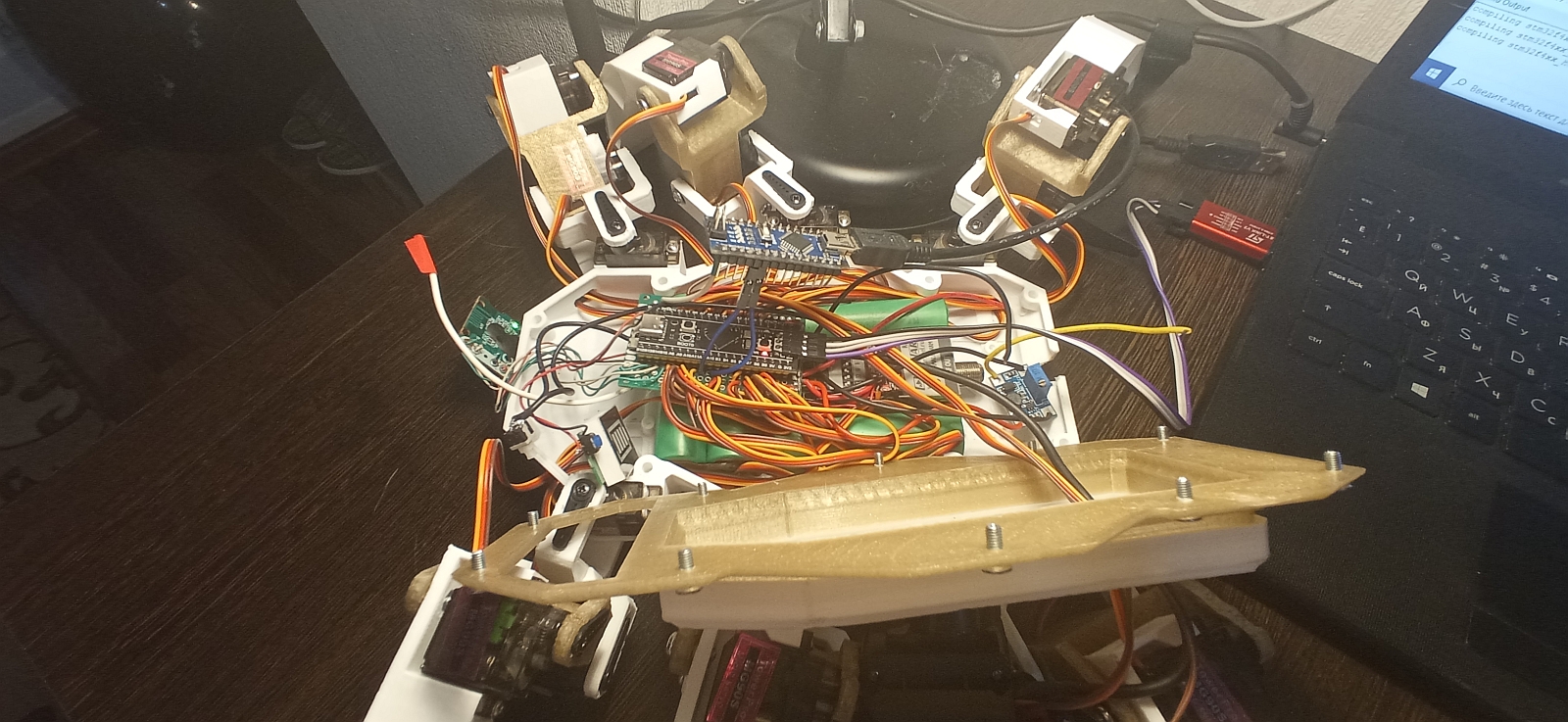
После этого мы расставляем всю электронику на свои места, так чтобы было удобно работать, и подключаем конечности и камеру, проверяем правильно ли функционирует робот.

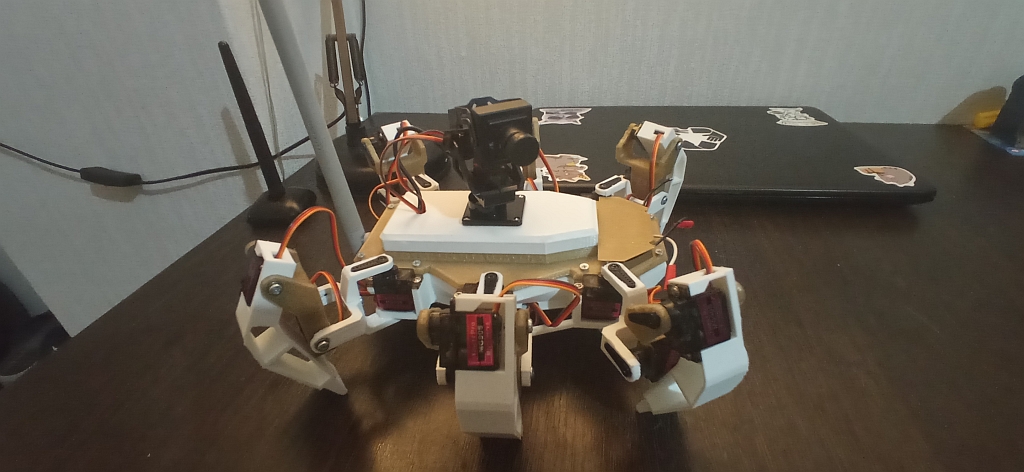
Сборка робота.
Следующий этап нашей работы программирование.
Программирование робота.
Настраиваем приёмник, управление камерой и самое главное настраиваем движение робота. Геометрия движение робота является сложной так как робот является шагающим.


Настройка робота.
Последним этапом является тестирование работоспособности, укладка проводов внутри корпуса и проведение тестирование основных функций робота: движение, машинное зрение.
Питание выполнено с помощью четырёх аккумуляторов 4.2 вольта 2 А/час соединенных попарно, и эти пары соединены последовательно, вследствие чего у нас получается 8.4 вольта 4 Ам/час.
- Инструкция по эксплуатации "МОДУЛЯТОРЫ ТЕЛЕВИЗИОННЫЕ МТ-202-01, МТ-202-02, МТ-202-03"
- Инструкция по эксплуатации "МОДУЛЯТОРЫ ТЕЛЕВИЗИОННЫЕ Micro-01, Micro-02, Micro-03"
Copyright © R9AL 2022 Все права защищены