
Слово "робот" имеет чешское происхождение, впервые его использовал писатель
Карел Чапек, в пьесе Р.У.Р. ("Разумные универсальные роботы", 1920), с легкой
руки своего брата художника Йозефа Чапека. На чешском языке слово robota
означает "тяжёлая работа", "барщина".
Мечта о создании искусственного человека занимала изобретателей еще в древние
времена. Легенды, об искусственных созданиях уводят нас в древнюю Грецию.
Сведения о первом практическом применении прообразов современных роботов -
механических людей с автоматическим управлением - относятся к эллинистической
эпохе. Тогда на маяке, сооружённом на острове Фарос, установили четыре
позолоченные женские фигуры. Днём они горели в лучах солнца, а ночью ярко
освещались, так что всегда были хорошо видны издалека. Эти статуи через
определённые промежутки времени, поворачиваясь, отбивали склянки; в ночное же
время они издавали трубные звуки, предупреждая мореплавателей о близости
берега.
В средние века изобретатели создавали различные механические фигуры людей и
животных - автоматоны, чаще всего с пружинным заводом. Первым автоматоном, о
котором до нас дошла информация, была механическая женщина, построенная еще
в 1246 г., которая могла ходить и говорить. Конечно, этот механический автомат
был очень далек от того, что мы сейчас называем роботами, это были механические
игрушки, имитирующие поведение живого организма.
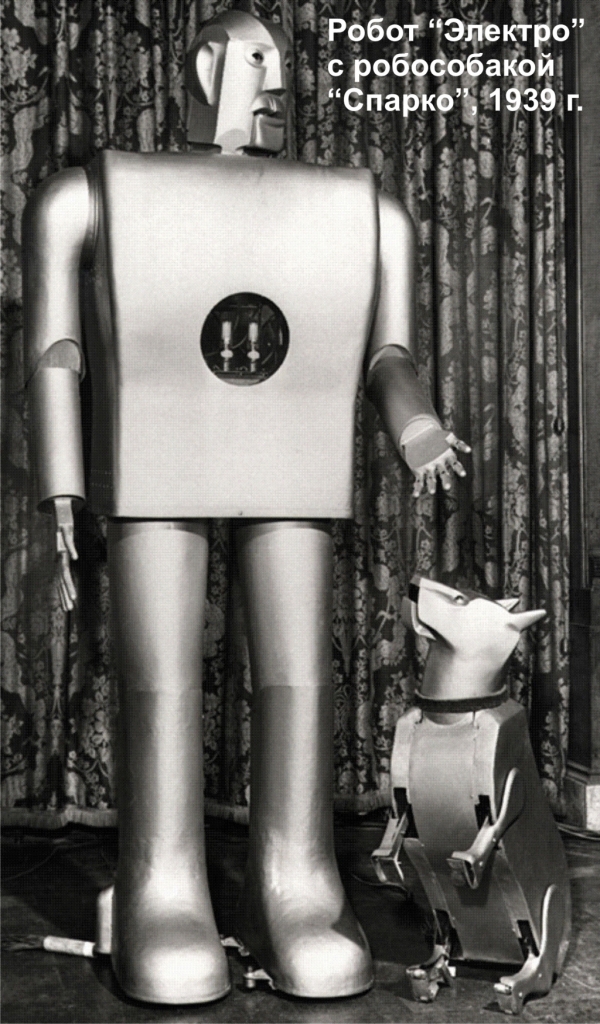
В начале прошлого века роботы развлекали публику, снимались в кино, занимались
рекламой, работали экскурсоводами и лекторами.

В середине прошлого века, с развитием электроники, очень активно начала
развиваться такая наука как кибернетика - наука об общих закономерностях
получения, хранения, преобразования и передачи информации в сложных управляющих
системах, И конечно же стали появляться различные кибернетические автоматы.
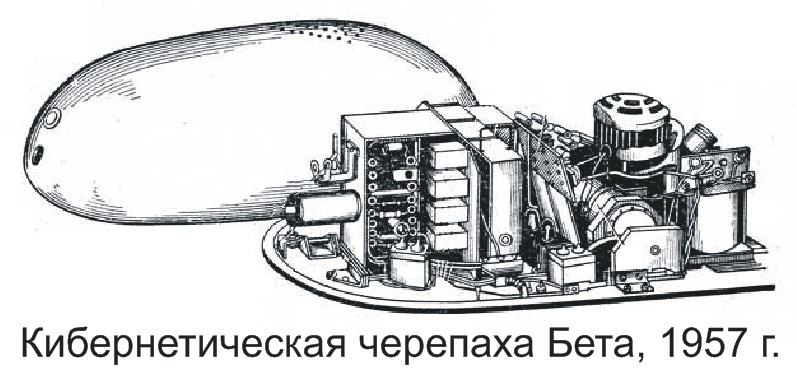
В 1948 году английским нейрофизиолог и пионер робототехники Грей Уолтер
(William Grey Walter) разработал и проводил эксперименты с биоморфными роботами,
которых называл machina speculatrix, но в историю они вошли именно как
"электронные черепашки".
Сегодня такой робот получил бы название BEAM-робот.
BEAM - это аббревиатура от Biology, Electronics, Aesthetics, Mechanics
(Биология, Электроника, Эстетика, Механика).
Принципы построения таких роботов, используют простые аналоговые цепи, вместо
микропроцессоров, с целью достичь необычно простого дизайна, который жертвует
гибкостью ради надёжности и эффективности выполнения определённого задания.
Роботы ВЕАМ обычно копируют поведение биологических объектов, взаимодействуя с
окружающей средой.
Попытки применения роботов для выполнения полезной работы привели к пониманию,
что робот не обязательно должен быть похожим на человека или иной живой
организм.
Хотя если мы представим робота в виде обобщенной функциональной схемы:
то увидим, что у робота есть датчики (аналоги органов чувств живого
организма, через которые попадает информация об окружающем мире), исполнительные
механизмы (аналог конечностей, которыми робот воздействует на окружающий мир,
передвигается в пространстве и т.д.). Есть источник питания, который дает
энергию роботу (также как желудчно-кишечный тракт получая еду, вырабатывает
энергию и набор химических элементов для живого организма), есть и система
управления - мозг робота и его нервная система. Также у робота может быть
оператор, который может контролировать робота или полностью управлять им.
Как видно, между роботом и живым организмом очень много общего.
Сегодня роботом называют автоматическое устройство, предназначенное для
осуществления различного рода механических операций, которое действует по
заранее заложенной программе. Но с развитием информационных технологий и это
определение уже устарело, сегодня "роботами" также называют некоторые автономно
действующие программы (боты).
Все многообразие роботов можно разделить на три большие группы:
- Управляемые роботы - требуют, чтобы каждым их движением управлял оператор.
- Автоматы - действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия.
- Автономные роботы - могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости.
Назначения роботов могут быть самыми разнообразными, от увеселительных и прикладных и до сугубо производственных. В соответствии с классификацией Международной организации по стандартизации, роботы делятся на два следующих типа:
- Промышленный робот. Говоря простым языком, промышленная робототехника - это все, что находится в производственном цеху. На сегодняшний день это самый распространенный вид роботов
- Сервисный робот - это робот, выполняющий полезную работу для людей и оборудования, исключая промышленные задачи по автоматизации. Проще говоря, это все роботы, которые не участвуют в производстве.
По типу устройства передвижения роботы делятся на:
- Колёсные/гусеничные роботы
- Шагающие/прыгающие роботы
- Летающие роботы
- Плавающие роботы
- Зооморфные роботы
- Роботы-скалолазы
- Специализированные роботы
Copyright © R9AL 2021 Все права защищены
