

Этот миниробот для соревнований "Сумо" был собран еще в 2018 году для
городских соревнований. Его размеры всего 10х10 см. Робот получился довольно
удачным, что подтверждается медалями и дипломами. Сумо достаточно жесткие
соревнования, какие-то мелкие повреждения робота неизбежны, как и на
тренировках перед соревнованиями.
К сожалению, в последних соревнованиях, разлетелся редуктор, да и вообще
настало время его разобрать, сделать капитальный ремонт и как-то
модернизировать. К сожалению, в 2018 году не было времени разместить описание
робота на сайте, поэтому надеюсь данная статья по разборке робота как-то это
компенсирует.
Принципиальная схема робота:
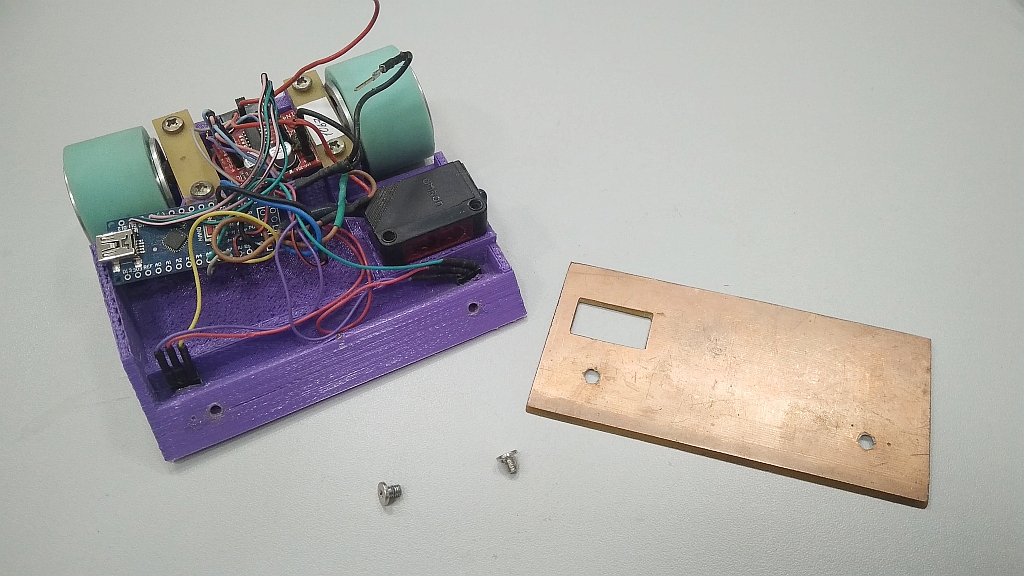
Для управления двигателями применяется драйвер на микросхеме MX1508, В качестве датчика расстояния использован датчик E3Z-D62 фирмы Omron, это не самое лучшее решение, но что было. И, кстати, применение одного датчика расстояние тоже не очень удачное решение, но места под второй датчик просто не было.
Разборка робота:
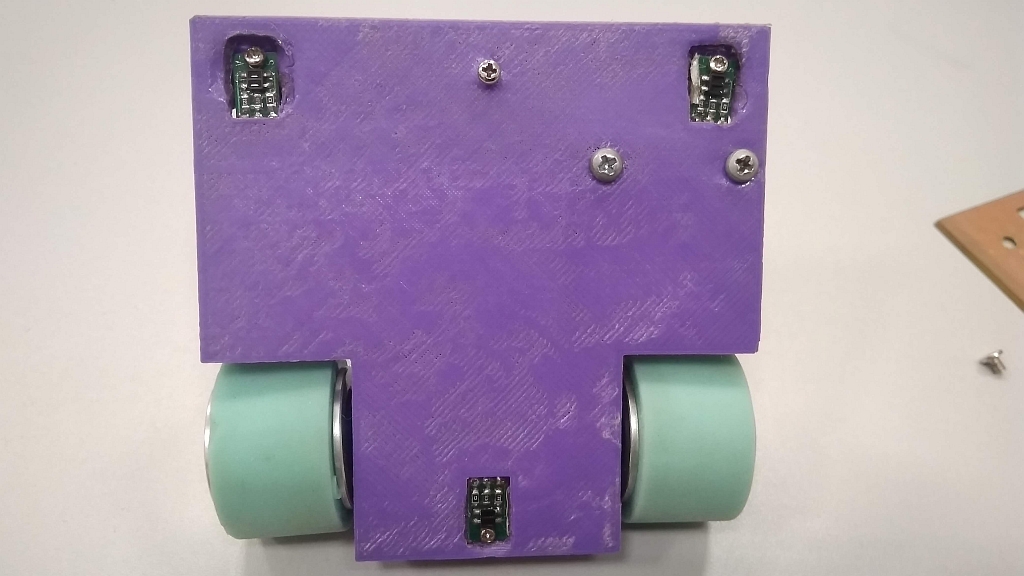


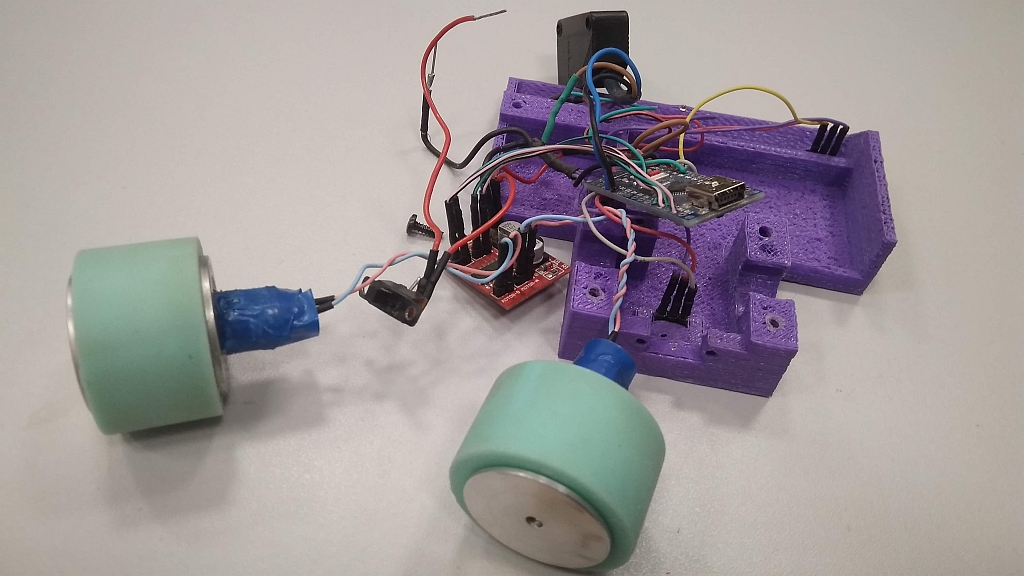
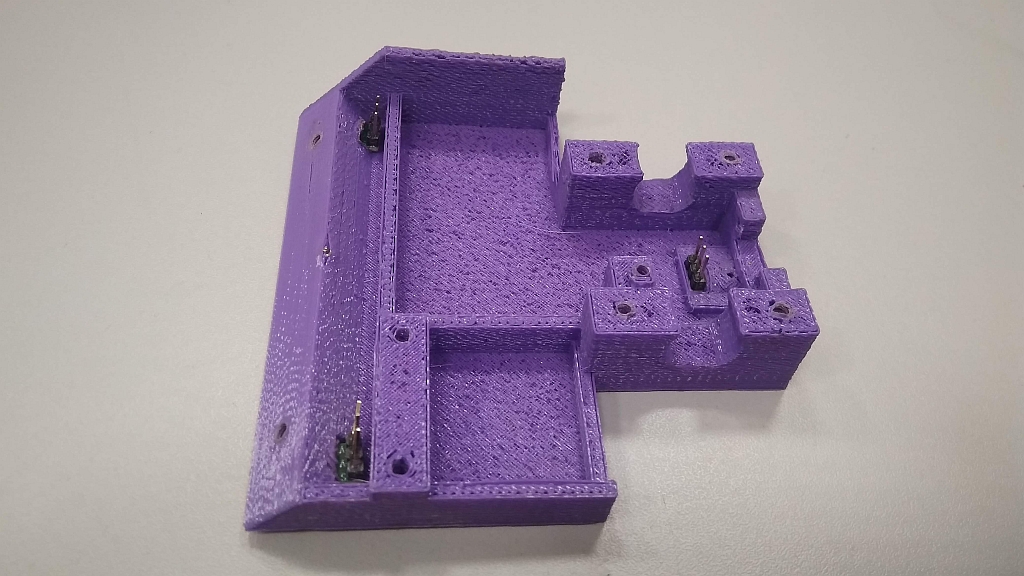
Сохранилась фото только что напечатанного на 3D-принтере основания робота:

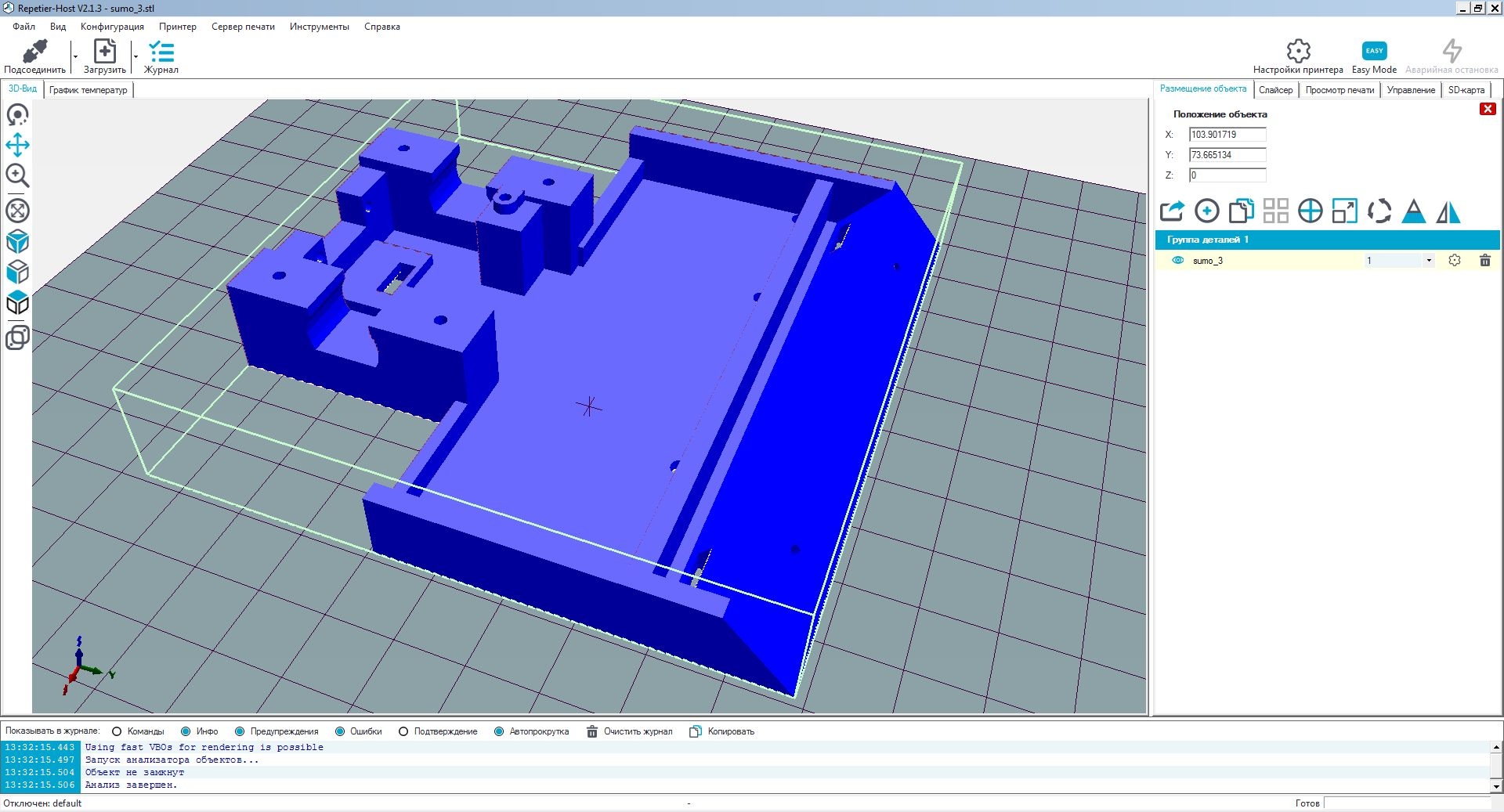
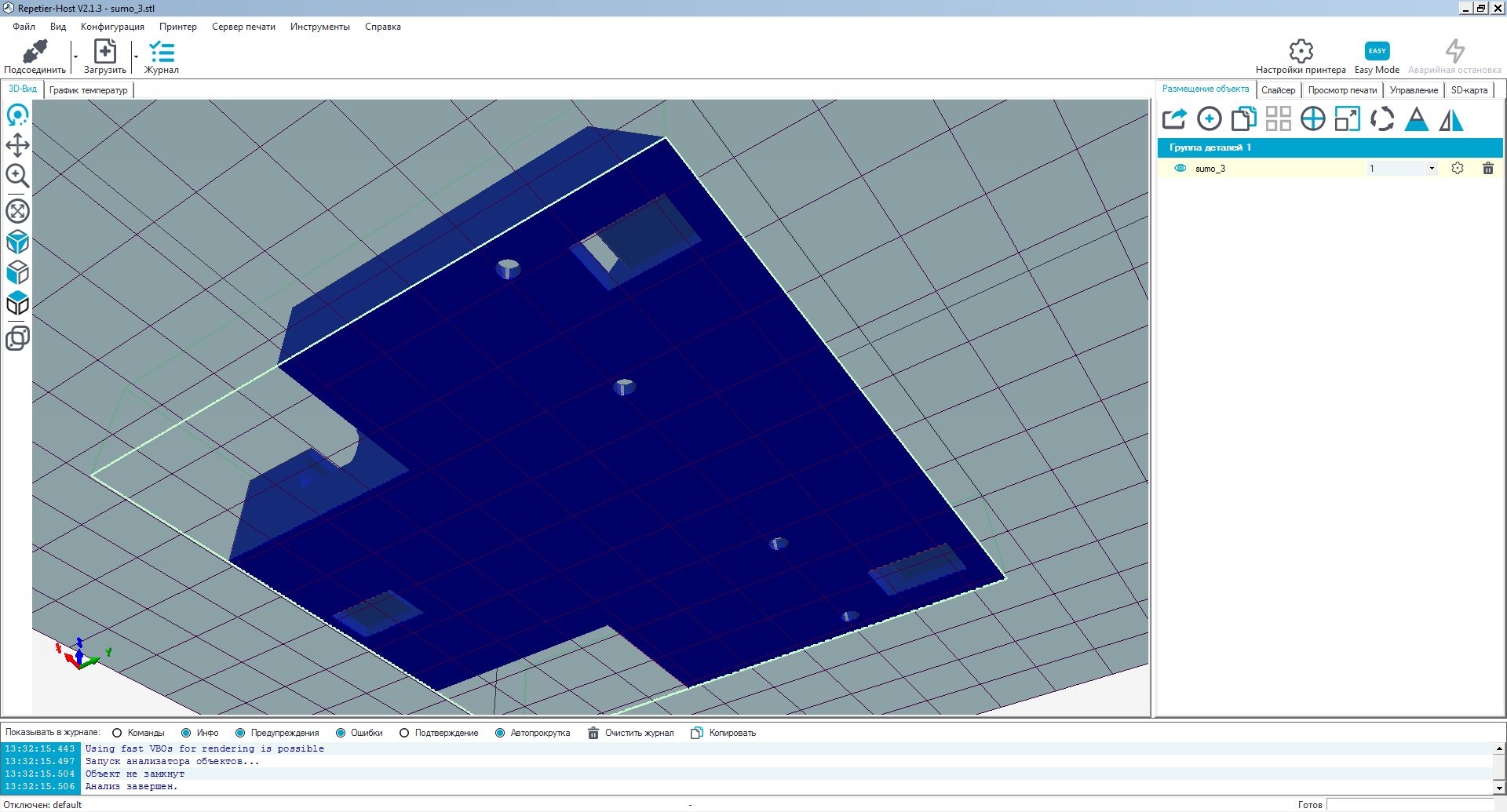
3D модель основания:
Обсуждение: http://msevm.com/forum/index.php?topic=7747.0
Файлы:
Обратная связь - предложения, пожелания, критика.
Copyright © R9AL 2020 Все права защищены
