
Описание энкодера
На следующей картинке показано, что происходит на выходах энкодера, после вращения ручки энкодера.
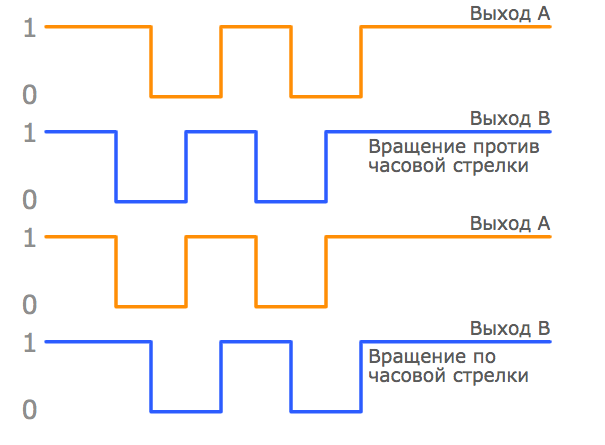
Этой картинки достаточно, чтобы работать с энкодером, подключаем его к stm32 и настраиваем пины к которым вы его подключили на вход (GPIO_INPUT), так же для индикации подключаем два светодиода и настраиваем пины для них на выход (GPIO_OUTPUT).
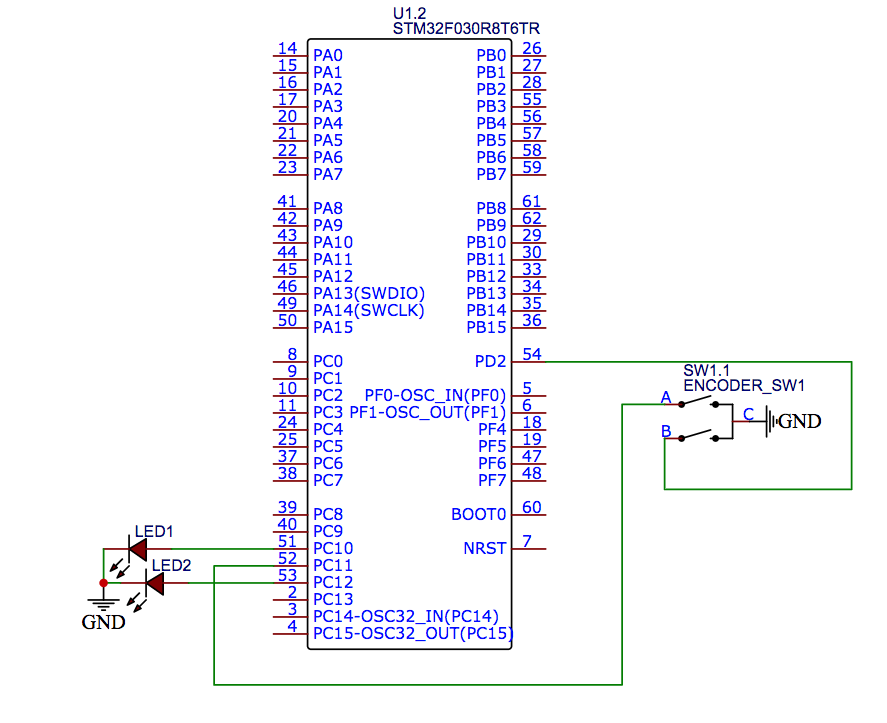
Схема:
Код в котором при вращении энкодера по часовой стрелке мигнет один светодиод, а против часовой, другой:
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
if (HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 0 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 1) {
while(HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 0 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 1) {}
while(HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 0 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 0) {}
while(HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 1 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 0) {}
HAL_Delay(10);
HAL_GPIO_WritePin(RL_GPIO_Port, RL_Pin, 1);
HAL_Delay(10);
HAL_GPIO_WritePin(RL_GPIO_Port, RL_Pin, 0);
}
else if (HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 1 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 0) {
while(HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 1 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 0) {}
while(HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 0 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 0) {}
while(HAL_GPIO_ReadPin(A_GPIO_Port, A_Pin) == 0 && HAL_GPIO_ReadPin(B_GPIO_Port, B_Pin) == 1) {}
HAL_Delay(10);
HAL_GPIO_WritePin(GL_GPIO_Port, GL_Pin, 1);
HAL_Delay(10);
HAL_GPIO_WritePin(GL_GPIO_Port, GL_Pin, 0);
}
}
Для упрощения работы с энкодером я написал простенькую библиотеку, ссылка на которую будет внизу статьи. В ней реализованы некотрые функции, для удобной работы с энкодером, а именно:
- ENC_PinInit() - инициализация пинов для энкодера
- ENC_read() - чтение состояния энкодера (должна постоянно вызываться)
- ENC_ROTATE_LEFT() - проверка. Возвращает 1, если энкодер был повернут против часовой стрелки
- ENC_ROTATE_RIGHT() - проверка. Возвращает 1, если энкодер был повернут по часовой стрелки
#include "stm32f0xx_hal.h"
В этой строке подключается библиотека микроконтроллера, она у каждого микроконтроллера она своя, поэтому нужно заменить ее на вашу (посмотреть ее можно в файле main.h вашего проекта).
После этого нужно настроить пины, обратите внимание, что при использовании библиотеки пины настраивать нужно в самой библиотеке, а не в проекте. Для этого нужно открыть файл encoder.h, и найти там такой код:
#define A_Pin GPIO_PIN_11
#define A_GPIO_Port GPIOC
#define B_Pin GPIO_PIN_2
#define B_GPIO_Port GPIOD
Вместо тех пинов, которые написаны, напишите те, которые используются у вас. Теперь можно использовать функции библиотеки. Тот же самый код, который писали ранее, только с использованием библиотеки:
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
ENC_read();
if (ENC_ROTATE_LEFT() == 1) {
HAL_GPIO_WritePin(RL_GPIO_Port, RL_Pin, 1);
HAL_Delay(10);
HAL_GPIO_WritePin(RL_GPIO_Port, RL_Pin, 0);
} else if (ENC_ROTATE_RIGHT() == 1) {
HAL_GPIO_WritePin(GL_GPIO_Port, GL_Pin, 1);
HAL_Delay(10);
HAL_GPIO_WritePin(GL_GPIO_Port, GL_Pin, 0);
}
}
Библиотека
Обсуждение: http://msevm.com/forum/index.php?topic=9939
Copyright © R9AL 2020 Все права защищены
