
Многие 3D принтеры, на основе Arduino, работают под управлением популярной прошивки Marlin.
Скачать прошивку можно здесь: https://github.com/MarlinFirmware/Marlin. Кстати, в арзиве есть примеры конфигурационных файлов для разного "железа".
Для заливки её в контроллер необходим Arduino IDE, версии не ниже 1.6.0. (и соответвенно, если я правильно понял, операционка не ниже Windows 7). Скачиваем отсюда: http://arduino.cc/en/main/software
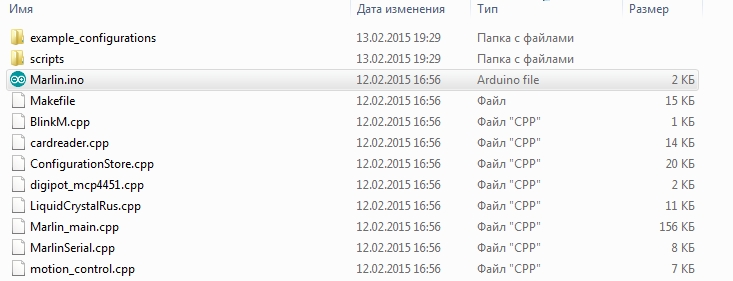
После того, как архив с прошивкой распакован, а Arduino IDE установлена - запускаем Arduino IDE и загружаем в нее прошивку, для этого нужно перейти в папку с прошивкой и загрузить файл Marlin.ino
Затем в среде Arduino IDE, с загруженной в нее прошивкой, нужно перейти на вкладку "Configuration.h"
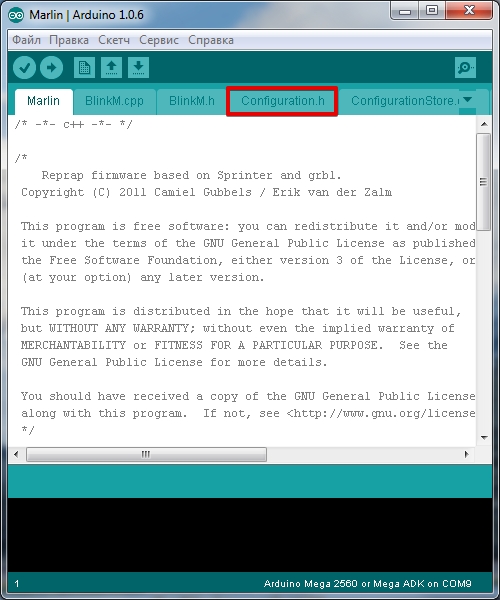
Это конфигурационный файл с основными настройками. Необходимо указать тип контроллера, тип температурного датчика, откалибровать перемещения по осям и сконфигурировать концевые выключатели.
Начинаем с выбора контроллера. Список контроллеров находится во вкладке "boards.h" Давим на треугольник в правом верхнем углу и выбираем boards.h.
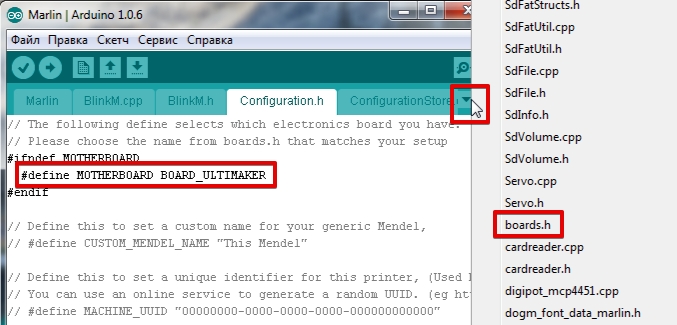
Я использовал контроллер RAMPS 1.4, поэтому в конфигурационном файле должно быть так:
*/ #ifndef MOTHERBOARD #define MOTHERBOARD BOARD_RAMPS_14_EFB #endif
Следующим шаг - выбор датчика температуры, термистора. В прошивке предлагается большой список "//// Temperature sensor settings:". Я понятия не имею какой у меня датчик, поэтому поставил 1, потом разберемся. Датчик стола пока отключен.
*/ #define TEMP_SENSOR_0 1 //хотенд #define TEMP_SENSOR_1 0 #define TEMP_SENSOR_2 0 #define TEMP_SENSOR_3 0 #define TEMP_SENSOR_4 0 #define TEMP_SENSOR_BED 0 //стол
Далее необходимо установить ограничение максимальной температуры хотэнда:
*/ #define HEATER_0_MAXTEMP 275"и ограничение минимальной температуры хотэнда:
*/ #define EXTRUDE_MINTEMP 170"
У меня используется только три концевых выключателя, все они стоят в позиции "HOME", подключены на "MIN" и в этом положении они замкнуты, а в положении отличном от HOME концевики разомкнуты.
// Mechanical endstop with COM to ground and NC to Signal uses "false" here (most common setup). #define X_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Y_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Z_MIN_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define X_MAX_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Y_MAX_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Z_MAX_ENDSTOP_INVERTING true // set to true to invert the logic of the endstop. #define Z_MIN_PROBE_ENDSTOP_INVERTING false // set to true to invert the logic of the probe.
Изменение направления вращения шаговых двигателей, значения false или true. Правильные перемещения сопла относительно стола:
- По оси X - влево "-", вправо "+".
- По Y - вперёд "+", назад "-".
- По оси Z - сближение "-", удаление "+".
- Экструдер. Extrude - выдавливание нити, Reverse (retract) - откат, втягивание нити.
#define INVERT_X_DIR false #define INVERT_Y_DIR false #define INVERT_Z_DIR false #define INVERT_E0_DIR false
Дальше идёт настройка концевых выключателей. Начало координат находится в ближнем левом углу на поверхности стола, если сопло вывести в эту точку, то сработают концевики MIN, если в правую дальнюю верхнюю - сработают MAX. У меня в положении HOME находятся три концевых выключателя MIN, поэтому мои установки:
// Sets direction of endstops when homing; 1=MAX, -1=MIN #define X_HOME_DIR -1 #define Y_HOME_DIR -1 #define Z_HOME_DIR -1
Настройка шагов перемещения по осям:
*/
#define DEFAULT_AXIS_STEPS_PER_UNIT { 45, 45, 4000, 500 }
Цифры 45 - это перемещение по осям X,Y, 4000 - по Z, 500 - экструдер.
Расчитываются они по формуле: (200 * 16)/(2 * 36) = 44.44 (округляем до 45)
По всем осям стоят шаговые двигатели 200 шагов на оборот (за один шаг вал двигателя поворачивается на 1.8 градуса, т.е. 360/1.8=200), 16 микрошагов на шаг (устанавливается перемычками на плате RAMPS). По осям X и Y стоит приводной ремень с шагом 2 мм и 36-ти зубые шкивы. По оси Z стоят шпильки М8 с шагом резьбы 2 мм, итого формула 200*16/2.
Все остальные настройки и калибровки больше экспериментальные, их лучше сделать после того как прошивка будет загруждена в контроллер.
Обсуждение: http://msevm.com/forum/index.php?topic=7401
Файлы:
Copyright © R9AL 2018 Все права защищены
