
Описание
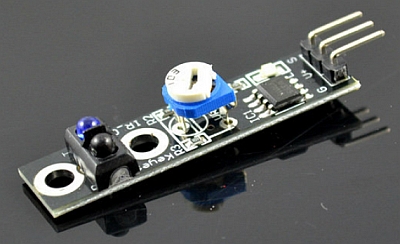
Модуль состоит из инфракрасного излучателя и фототранзистора, который принимает отраженный сигнал от объекта, расположенного на небольшом расстоянии - 1-20 мм. Датчик можно использовать для отслеживания и движения робота по черной линии, так как от черного цвета сигнал отражается плохо, а при потере роботом линии и отражении от белого цвета сигнал отражается хорошо. Для настройки дальности срабатывания датчика имеется переменный резистор. При срабатывании загорается светодиод на плате и на выходе "S" появляется лог. 0.
Также этот оптический сенсор можно применять для детектирования отражающих предметов или для измерения оборотов вала двигателя.
Пример кода:
int Led = 13 ; // define LED Interface
int buttonpin = 3; // define Tracking Sensor Interface
int val ; // define numeric variables val
void setup ()
{
pinMode (Led, OUTPUT) ; // define LED as output interface
pinMode (buttonpin, INPUT) ;/ / define Tracking sensor output interface
}
void loop ()
{
val = digitalRead (buttonpin) ; // digital interface will be assigned a value of 3 to read val
if (val == HIGH) // When the Tracking sensor detects a signal, LED flashes
{
digitalWrite (Led, HIGH);
}
else
{
digitalWrite (Led, LOW);
}
}
Обсуждение на форуме
Copyright © R9AL 2018 Все права защищены
