
G6LVB Rotor interface
Конструкцию интерфейса разработал Howard Long G6LVB
Интерфейс отличается простотой конструкции, небольшой стоимостью и при этом
обеспечивает достаточно высокие характеристики. Наличие возможности подключения
дополнительных модулей (LCD дисплей, USB адаптер,кнопки управления),
совместимость с современными компьютерами, поддержка набора команд GS-232 и
EasyComm I, доступный PIC процессор и прошивка ставят конструкцию вне
конкуренции как простую и доступную для повторения в домашних условиях.
Схема универсальна, позволяет подключать не только фирменные роторы но и
самодельные, любой конструкции. Нужно только чтобы в качестве датчиков
положения использовались переменные резисторы номиналом от 1-50 кОм, при этом
изменение напряжений должно быть в пределах 0-5 Вольт. При этом поддерживаются
поворотки 0-360 или 0-450 градусов по азимуту и 0-90 или 0-180 по элевации,
также поддерживаются северный или южный роторы (устанавливается при калибровке).
Калибровка интерфейса производится в любой терминальной программе на скорости
9600 8N1 При подключении для проверки связи с процессором напечатайте С
плата ответит Az 023 или чтото подобное, затем нужно угнать налево в
0 градусов азимут и напечатать F A S, угнать вниз на 0 градусов элевацию и
напечатать F E S, угнать на право в 450 градусов азимут и напечатать
F A F потом установить 180 градусов элевации и напечатать F E E
в конце всех операций сохранить данные F W и все, калибровка закончена,
процессор сохранит данные в EEPROM и будет использовать их при следующем
включении.
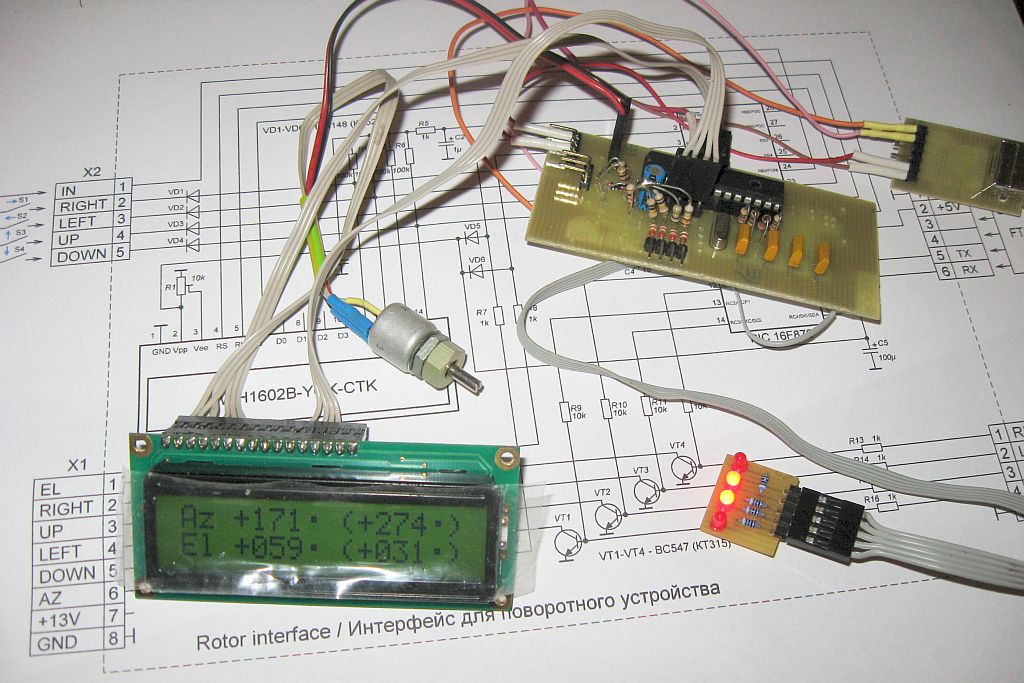
Я немного упростил схему, убрав из нее то, что мне не нужно. Вот что получилось:
Как видно из схемы, в основе - микроконтроллер PIC16F876(A). В качестве экрана используется LCD-дисплей WH1602B-YGK-CTK (но схема может работать и без него, его наличие определяется программой автоматически). Для связи с компьютером использован USB адаптера на базе FT232RL.
Пока все это работает в виде макета, в качестве основной платы использована печатная плата, разработанная RX9A.
Программное обеспечение
В качестве программы управления использован саттреккер "Орбитрон". Управление через драйвер "WispDDE"
Настройка программы:
После установки программы "Орбитрон" и настройки основных параметров, скачиваем драйвер "WispDDE". Устанавливаем его. После установки, необходимо в программе "Орбитрон" перейти на вкладку "Ротор\Радио" и нажать на кнопку "Загрузить выбранный драйвер и начать передачу данных".
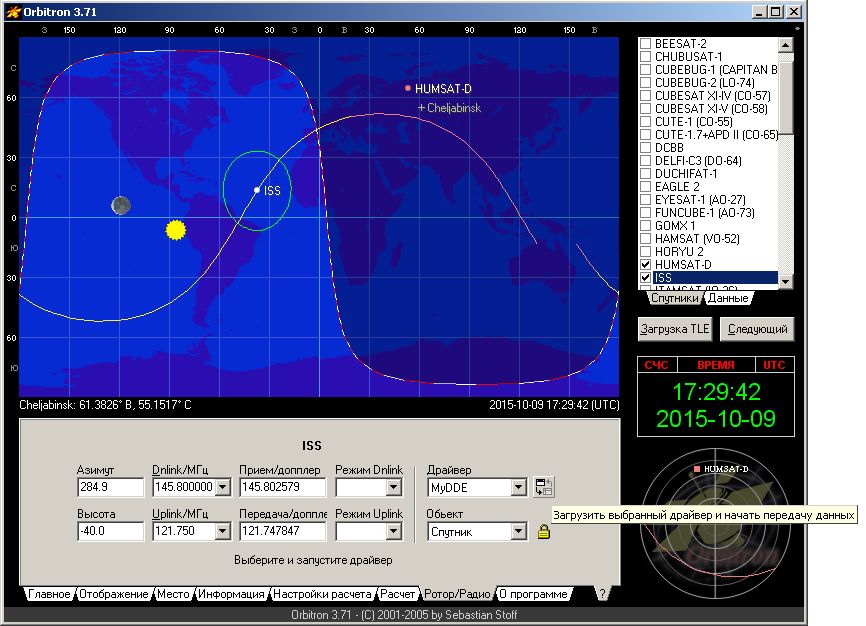
При первом нажатии программа попосит указать катлог, где установлен "WispDDE". После чего откроется окно программы "WispDDE"
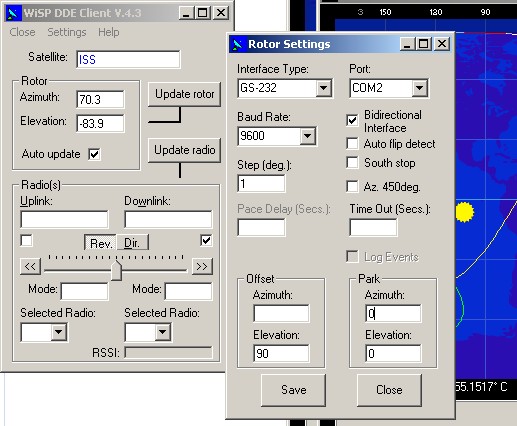
Открываем вкладку "Setting->rotor" и прописываем номер порта и остальные параметры.
Продолжение
Вопросы и комментарии на форуме: https://forum.msevm.ru/index.php?topic=7
Файлы:
- Firmware07.zip - Прошивка, v.07 использует продвинутый протокол обработки данных АЦП с "плавающей точкой". Поддерживается стандартный набор команд GS-232, кроме того расширенный набор команд GS-232 также поддерживается, при использовании протокола Easycomm переключение между ними происходит автоматически (версия 0.7 и выше).
- rx9a.zip - Печатная плата от RX9A, для этого проекта с ft232rl, блок реле отдельно, LCD и кнопки отдельно.
- wispdde.zip - WiSPDDE (Ver. 4.3.7)
Литература:
Copyright © R9AL 2015 Все права защищены
