
Робот-жук мини - это открытый проект сайта
http://www.customelectronics.ru/joystickshield/.
Этот робот разрабатывался как учебный и применялся на чемпионатах
WorldSkills и других соревнованиях профессионального мастерства.
Основная цель разработки устройства - демонстрация возможностей
схемотехники на простых дискретных компонентах.
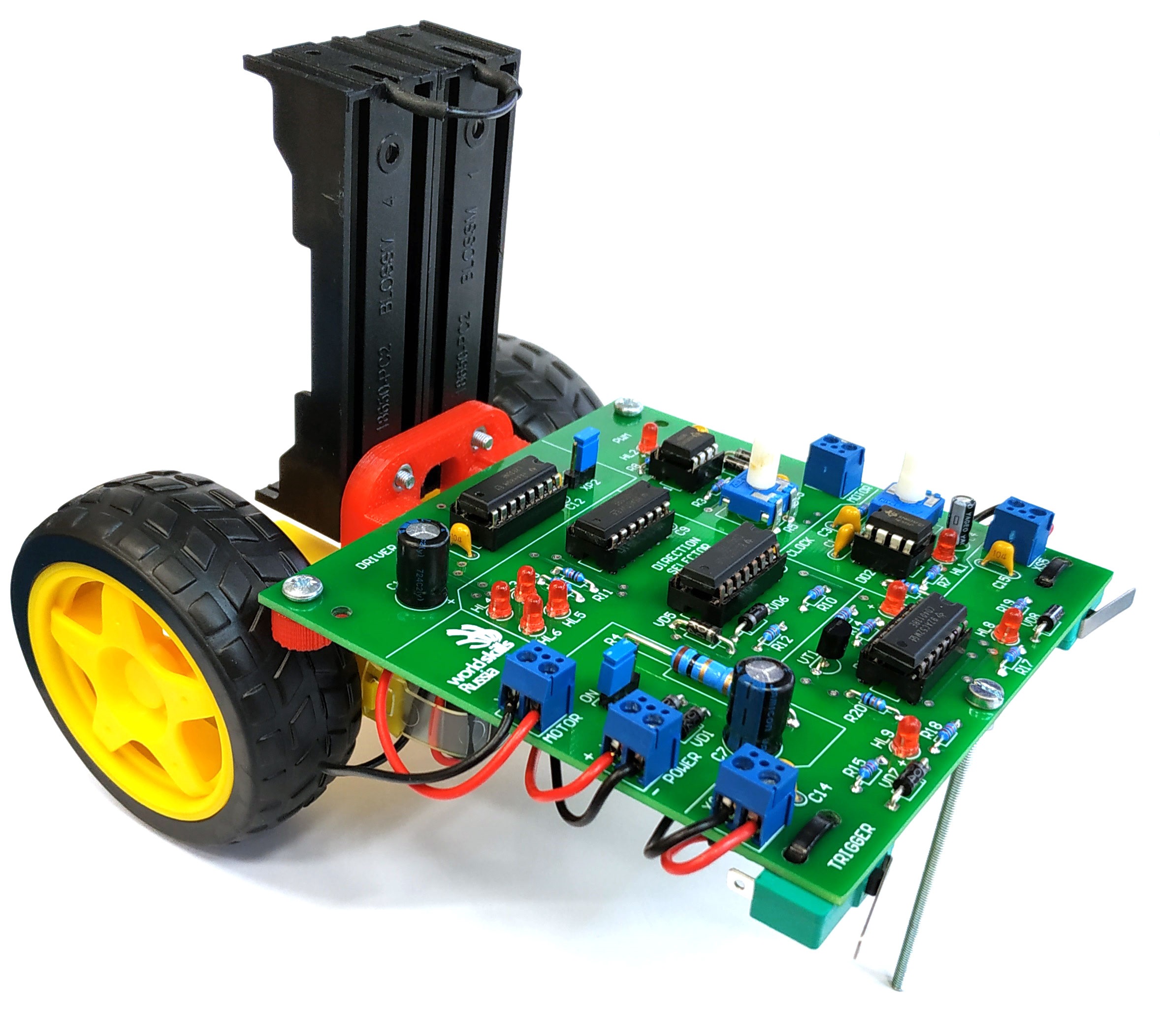
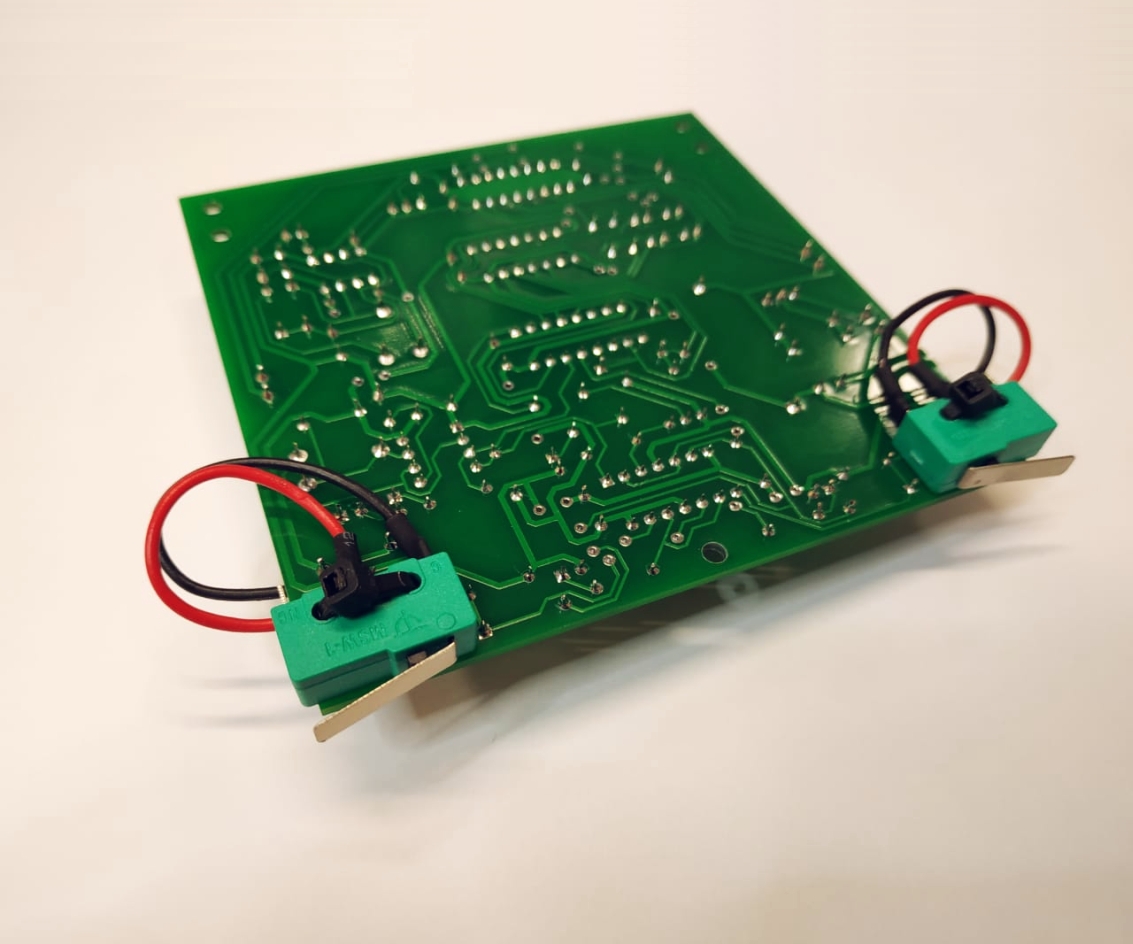
Робот-жук представляет из себя печатную плату с закрепленной на ней мотор-рамой
и двумя аккумуляторами формата 18650. В торцевой части установлены два
концевых выключателя, которые позволяют детектировать столкновение с
препятствием. Сразу после включения питания жук начинает двигаться вперед
до столкновения с препятствием. При столкновении происходит остановка. Затем,
после паузы, робот объезжает назад, поворачивается на небольшой угол, делает
паузу и снова возобновляет движение.
Все собрано на простых выводных компонентах с применением 3D-печати.
Принципиальная схема:
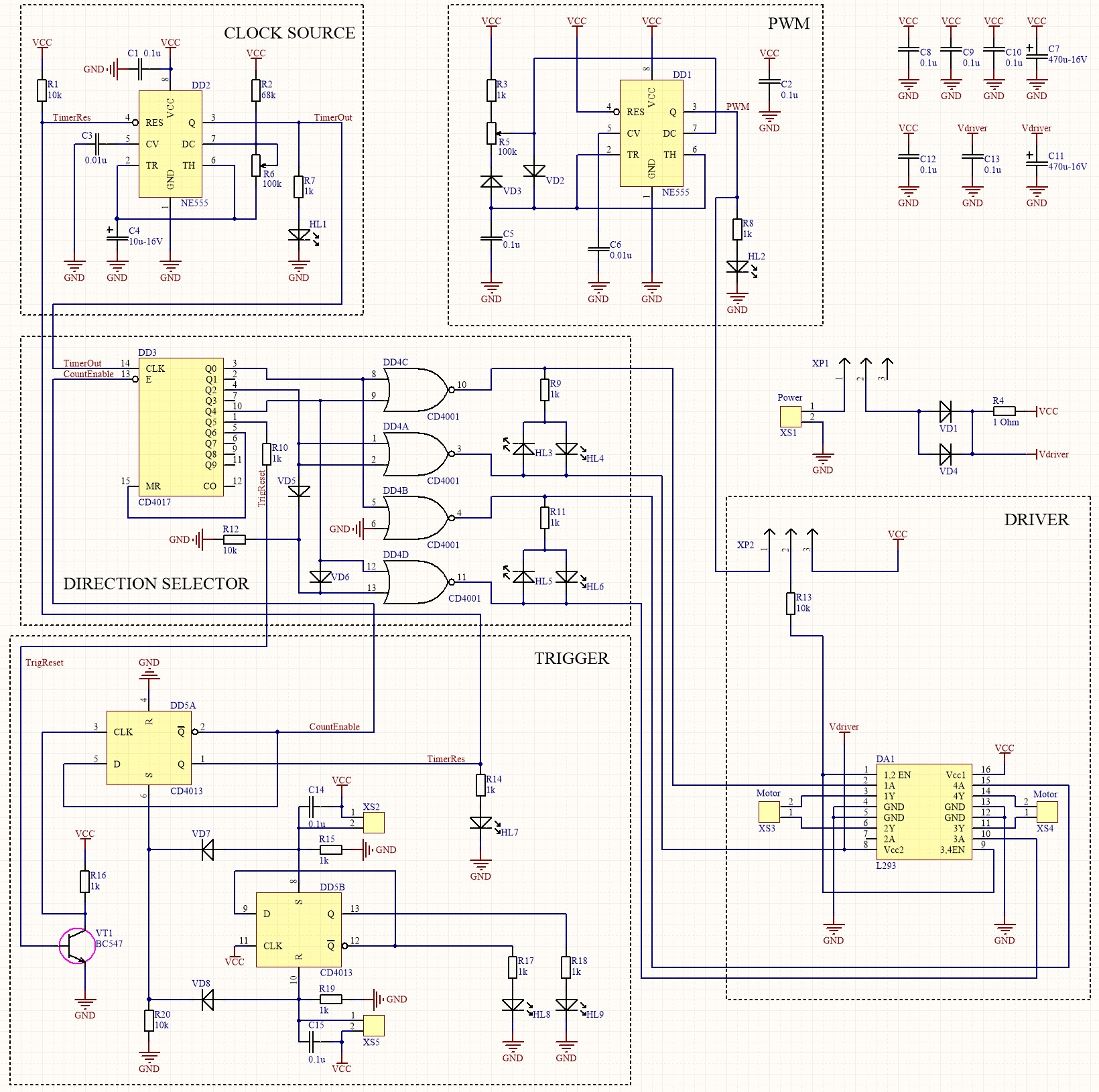
Питание подключается к разъему XS1 и может быть отключено джампером на разъеме
XP1. Все движение управляется в первую очередь с триггера на микросхеме DD5A.
В начальном состоянии его прямой выход установлен в ноль и комбинация сигналов
на выходах микросхемы DD4 формирует набор состояний, при котором оба двигателя
вращаются вперед.
При замыкании любого из концевых выключателей, выход триггера устанавливается
в единицу. Сигнал TimerRes запускает тактовый генератор CLOCK SOURCE, а сигнал
CounterEnable разрешает работу счетчика DD3. С каждым тактом генератора
изменяется состояние выходов счетчика и происходит изменение состояния выходов
логических элементов таким образом, что выполняется последовательность
действий: остановка -> движение назад -> остановка -> поворот -> остановка ->
движение вперед.
В момент возобновления движения вперед, через транзистор VT1 происходит
изменение состояние триггера. Тактовый генератор и триггер отключаются до
повторного столкновения с препятствием.
Также в схеме присутствует блок PWM, выполненный по типовой схеме включения
NE555 в режиме генератора ШИМ-сигнала. Это позволяет регулировать скорость
вращения двигателей через специальный вход драйвера L293.
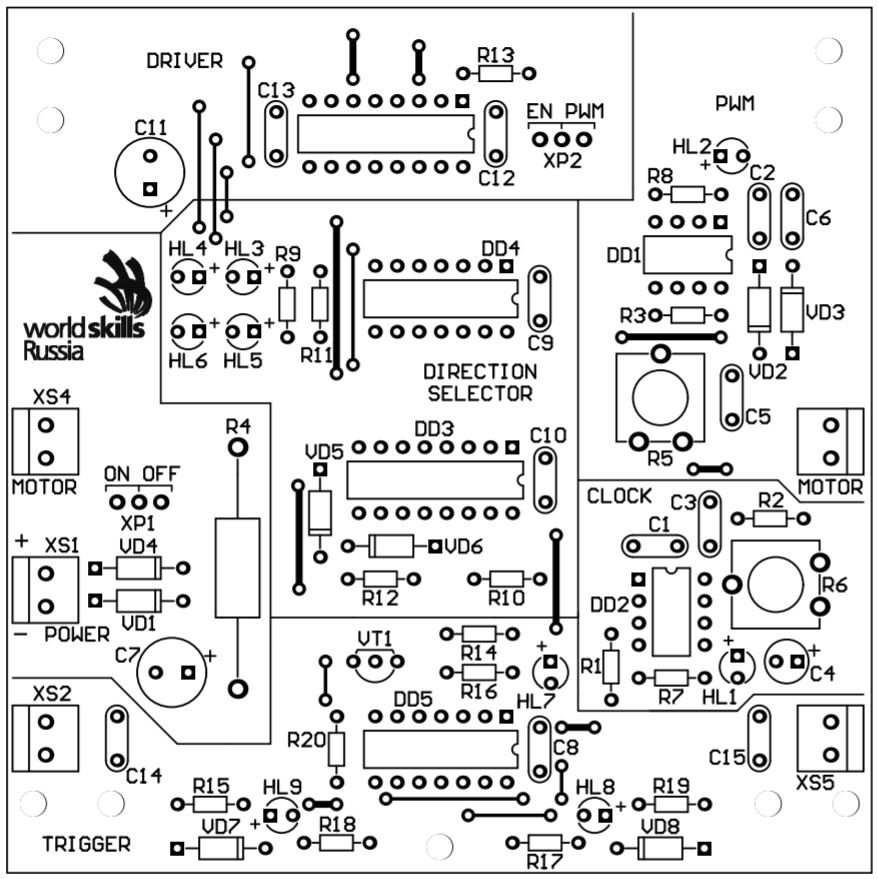
Сборочный чертеж:
Плата разработана таким образом, что ее можно сделать односторонней.
В этом случае достаточно будет установить несколько перемычек показанных на
чертеже. Если плата двухсторонняя, то паять перемычки, конечно, не надо.
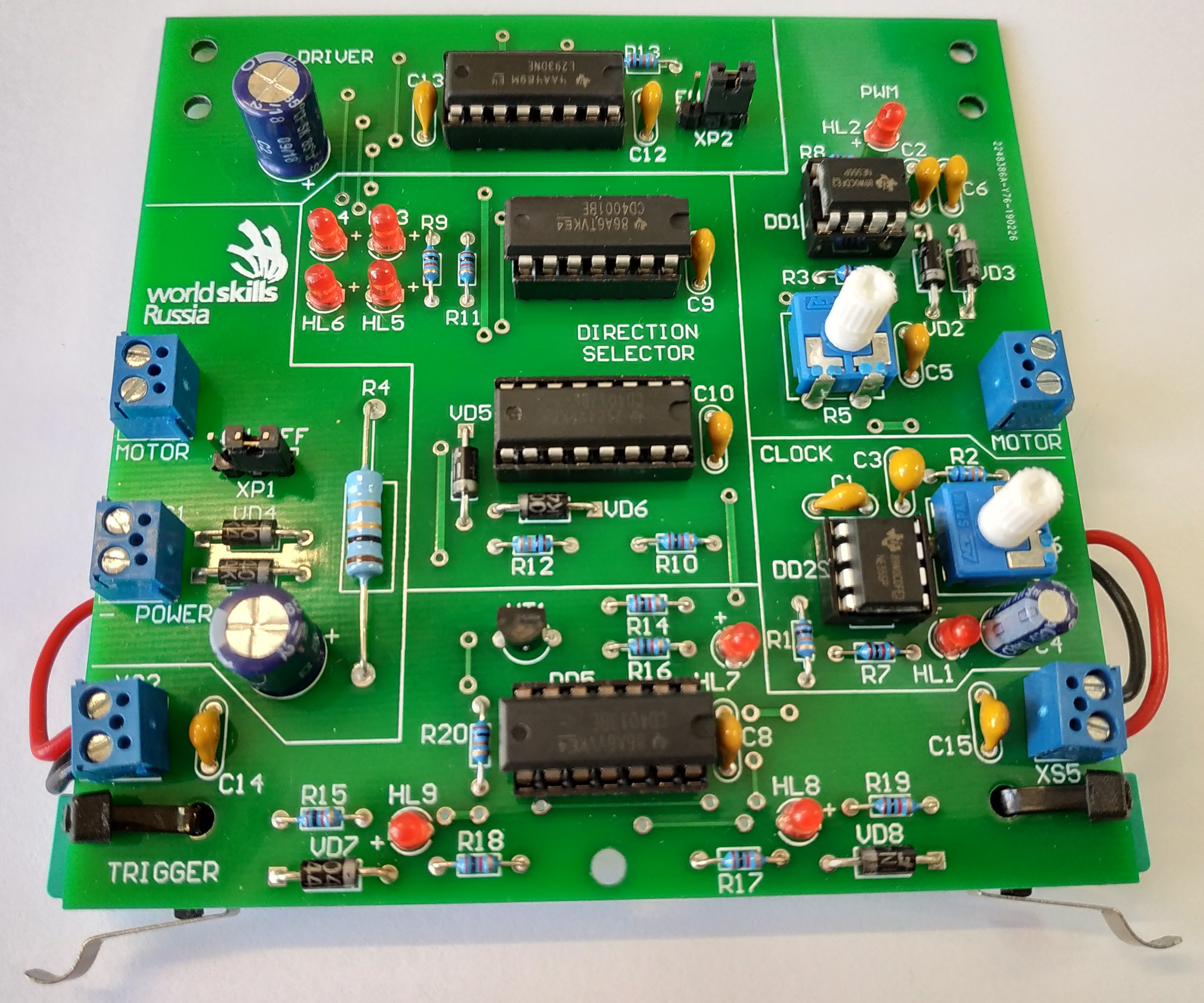
Печатная плата в сборе:
Файлы:
- Гербер-файлы для изготовления печатной платы
- STL-модель для изготовления держателя двигателей и батарей
Copyright © R9AL 2022 Все права защищены