
Обзор
В этом уроке вы узнаете, как управлять небольшим двигателем постоянного тока
с помощью MEGA2560 R3 и транзистора.
Необходимые компоненты:
- Lafvin Mega2560 R3 - 1шт.
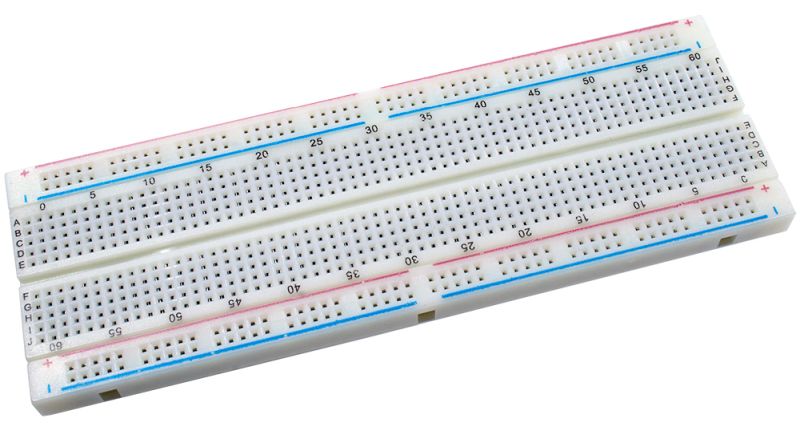
- 830 tie-points Breadboard - 1шт.
- Микросхема L293D - 1шт.
- Вертушка вентилятора и 3V-мотор - 1шт.
- M-M провода - 5шт.
- Модуль питания - 1шт.
- Блок питания, 9В/1А - 1шт.
{kind=link}
Описание компонентов
Модуль питания:
Небольшой двигатель постоянного тока, вероятно, будет потреблять больше энергии,
чем цифровой выход платы MEGA2560 R3 может обеспечить. Если мы попытаемся
подключить двигатель прямо к контактам платы MEGA2560 R3, высока вероятность,
что мы повредим плату MEGA2560 R3, поэтому мы используем модуль питания.
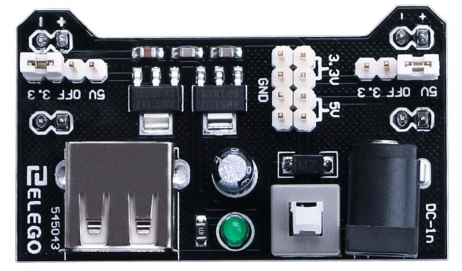
Технические характеристики:
- Включения/Выключения питания
- Светодиодный индикатор питания
- Входное напряжение: 6,5-9 в (DC) через штекер 5,5 мм x 2,1 мм
- Выходное напряжение: 3.3 В/5В
- Максимальный выходной ток: 700 мА
- Независимый выход шин 0В, 3,3 в, 5В к макетной плате
- Выходные контакты для удобного внешнего использования
- Размер: 53 x 32 x 23 мм
- USB-разъем для питания внешнего устройства
установка выходных напряжений

Левый и правый выход напряжения можно настроить независимо. Чтобы выбрать выходное напряжение, переместите джампер на соответствующие контакты. Примечание: светодиодный индикатор питания и направляющие питания макетной платы не включатся, если обе перемычки находятся в положении "выкл.".
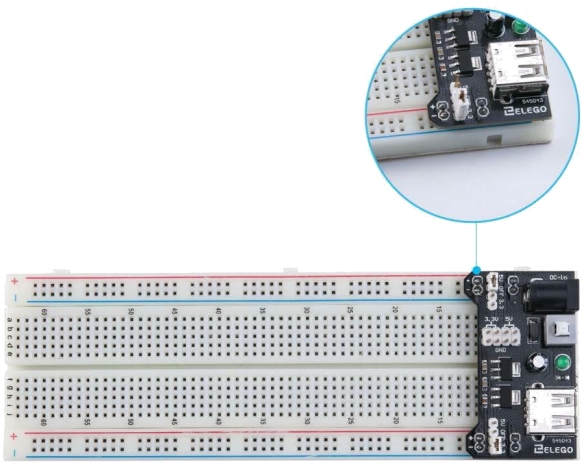
Важное замечание:
Убедитесь, что вы правильно выровняли модуль на макете. Отрицательный вывод
(-) на модуле совпадает с синей линией (-) на макете, а положительный вывод
(+) - с красной линией (+). Невыполнение этого требования может привести к тому,
что вы случайно переключите питание на своём проекте.
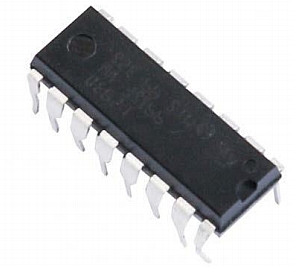
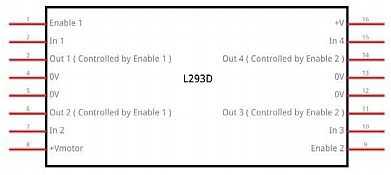
L293D
Это очень полезная микросхема, фактически может управлять двумя двигателями
независимо. В этом уроке мы используем только половину чипа, большинство
контактов на правой стороне чипа предназначены для управления вторым двигателем.
Технические характеристики
- Широкий диапазон питающего напряжения: от 4,5 В до 36 В
- Отдельный вход для источник питания логики.
- Внутренняя защита от статики.
- Тепловое Отключение
- Входы с высокой помехоустойчивостью
- Функционально аналогичен SGS L293 и SGS L293D
- Выходной ток 1А на канал (600 мА для L293D)
- пиковый выходной ток 2А на канал (1,2 а для L293D)
- выходные защитные диоды для подавления индуктивныйх переходных процессов (L293D)
Описание L293 и L293D содержит четыре полумостовых драйвера. L293 предназначен для обеспечения двунаправленных токов привода до 1А при напряжениях от 4,5 В до 36 В. L293D предназначен для обеспечения двунаправленных приводных токов до 600 мА при напряжении от 4,5 В до 36 В. Оба устройства предназначены для привода индуктивных нагрузок, таких как реле, соленоиды, шаговые двигатели постоянного тока и биполярные шаговые двигатели, а также других сильноточных/высоковольтных нагрузок при положительном питании. Все входы совместимы с TTL. Каждый выход представляет собой полную схему привода на транзисторвх Дарлингтона. Драйверы включаются попарно, драйверы 1 и 2 включаются входом ENABLE1,2, а драйверы 3 и 4 включаются входом ENABLE1,2. Когда вход ENABLE1 высок, соответствующие драйверы включены, а их выходы активны и находятся в фазе с их входами. Когда вход ENABLE1 низкий, эти драйверы отключены, а их выходы выключены и находятся в высокоимпедансном состоянии. При правильном вводе данных каждая пара драйверов образует полный H (или мостовой) реверсивный привод, подходящий для применения в соленоидах или двигателях.
Блок-схема

Мне надоели неразборчивые схемы распиновки в таблицах данных, поэтому я разработал свою собственную, которая, как мне кажется, дает более уместную информацию. Есть 3 провода, подключенные к Arduino, 2 провода, подключенные к двигателю, и 1 провод, подключенныйк батарее.

Чтобы использовать эту распиновку: Левая сторона имеет дело с первым двигателем, правая сторона имеет дело со вторым двигателем. И да, вы можете запустить его только с одним подключенным двигателем.
Соединения Arduino
"M1 PWM" подключите к ШИМ-контакту на Arduino. Они помечены на 2560, например пин-код 5. Выведите любое целое число от 0 до 255, где 0 будет выключено, 128-половина скорости и 192-максимальная скорость. "M1 direction 0/1" и "M1 direction 1/0" - подключить к цифровым пинам Arduino. Выведите на один пин высокий, а на другой - низкий уровень, и двигатель будет вращаться в одном направлении. Переключите выходы на низкий и высокий, и двигатель будет вращаться в другом направлении.

Монтажная схема:
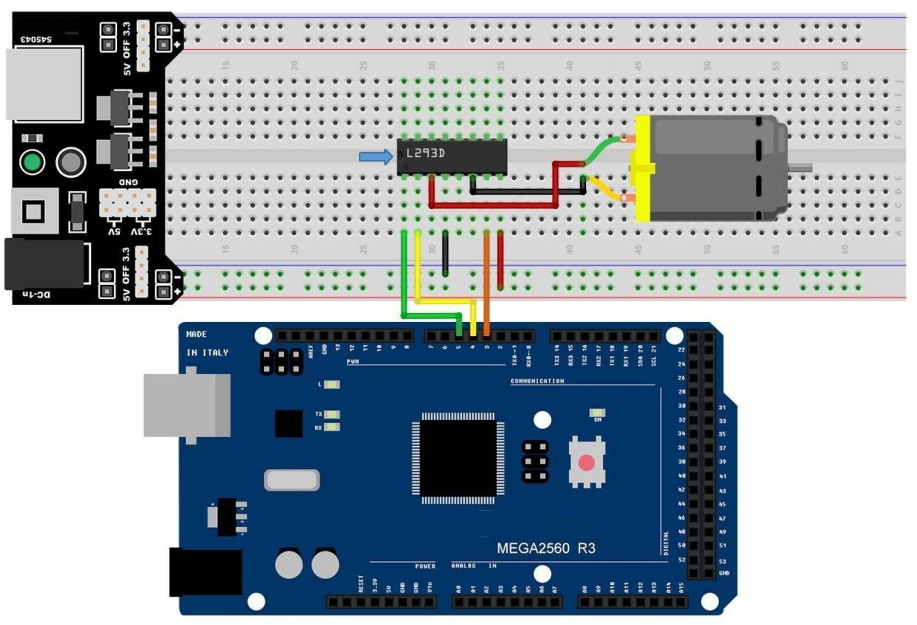
Приведенный ниже код не использует отдельный источник питания (то есть батарею), вместо этого он использует питание 5 В от Arduino. Обратите внимание, что это было бы рискованно без управления L293D. Вы никогда не должны подключать двигатель непосредственно к Arduino, потому что при выключении двигателя вы получаете электрическую обратную связь. С маленьким мотором это повредит вашему Arduino, а с большим мотором вы можете наблюдать интересный эффект пламени и искр.

Код:
После подключения, пожалуйста, откройте программу в папке с кодом
Урок 29 и нажмите кнопку Загрузить, чтобы загрузить
программу. См. Урок 2 для
получения подробной информации о загрузке программы при наличии ошибок.
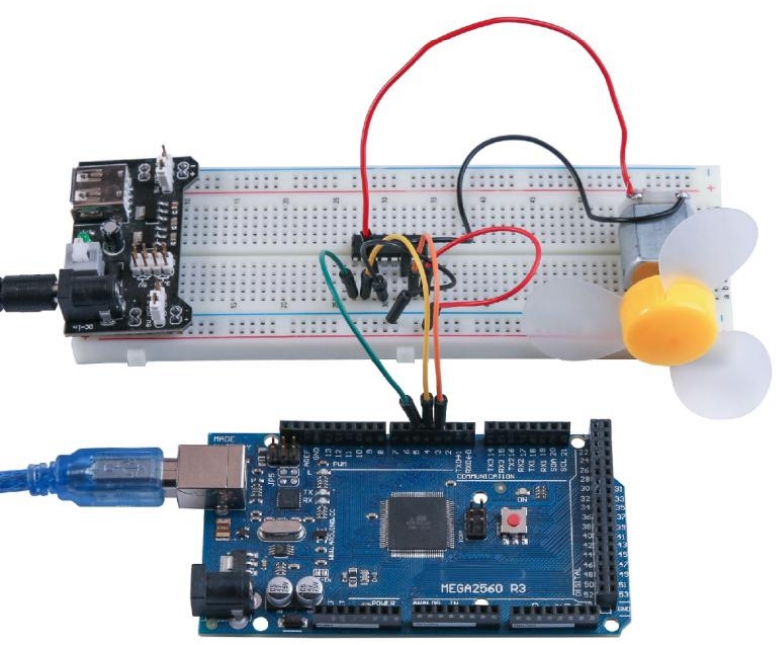
После загрузки программы включите все выключатели питания. Двигатель будет
слегка вращаться по часовой стрелке затем против часовой стрелки, и так 5 раз.
Затем он продолжит резко вращаться по часовой стрелке. После короткой паузы он
резко повернется противчасовой стрелки. Затем плата контроллера пошлет
ШИМ-сигнал для привода двигателя, двигатель медленно уменьшит свои обороты
с максимума до минимума и снова увеличит их до максимума. Наконец, он
останавливается на 10 секунд, до начала следующего цикла.
Пример:
Обсуждение на форуме
Copyright © R9AL 2020 Все права защищены
